Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !
Dernières nouvelles
Carte Holonome 2023 - Enfin soudée !
2 décembre 2022
Nous vous avions présenté la carte nue, la documentation interactive de la carte mais pas la carte soudée ! Il lui manque bien un ou deux connecteur, mais la voici :

Carte Holonome 2023 soudée
Mots clés : Électronique, Photo, Robot holonome, 2023, Raspberry Pi Pico
Codeurs et asservissement des moteurs
29 novembre 2022
Ce week-end, nous avons changé le châssis en medium 3 mm (cassé) par un châssis en contre plaqué de 5 mm. En démontant les moteurs nous en avons profité pour installer les codeurs à l’arrière des moteurs. En effet, nos moteurs sont équipés d’un axe arrière dédié à la fixation d’un codeur.
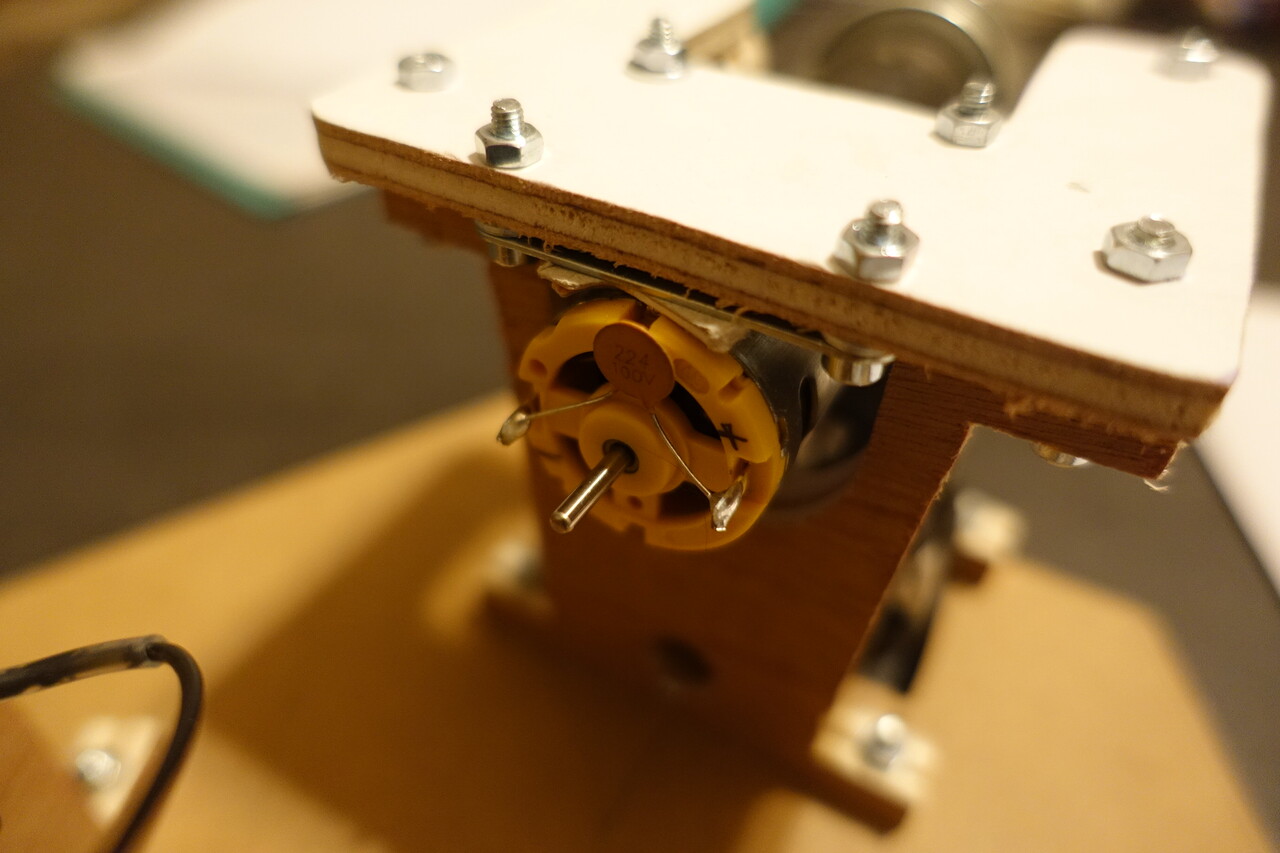
Axe arrière du moteur
C’est sur cet axe arrière que nous fixons notre codeur en kit.

Codeur en kit
Pour ceux qui ne connaissent pas trop le fonctionnement de la roue codeuse, il s’agit d’une petite diode qui va éclairer un disque strié. Un récepteur va détecter la variation de lumière due aux stries et ainsi compter le passage des stries. En ajoutant un léger décalage avec un second capteur, il est possible de déterminer le sens de rotation du disque. Quelques informations supplémentaire par ici.
Voici notre disque en détail, c’est quand même une jolie pièce !

Disque du codeur
Une fois l’ensemble tout remonté, nous revérifions que la lecture des codeurs et le pilotage des moteurs fonctionnent bien. Une petite surprise nous attendait sur le moteur 3, un court-circuit maintenait la broche PWM à la masse...
Bref, le robot était presque prêt à faire ses premiers tours de roue. Dernière étape avant un déplacement sommaire, l’asservissement des moteurs.
Asservissement des moteurs
Voici notre démarche pour régler notre asservissement. Notez qu’il s’agit d’un processus itératif et que nous nous arrêtons dès que le résultat nous semble correct. Nous ne sommes pas allés chercher l’optimisation !
Pour nos essais, nous fixons une consigne à 500 mm/s et un gain P arbitraire.

Réglage initial
L’oscillation montre un gain trop fort. Nous le divisons par 2.

Première réduction du gain
Observons la valeur finale, de 350 à 400 mm/s. Nous ajoutons un intégrateur pour améliorer la précision de l’asservissement.

Ajout de l’intégrateur
Nous sommes plus près de 500 mm/s, mais ça oscille énormément. Nous divisons par 10 le gain de l’intégrateur.

Diminution de l’intégrateur
Le début semble encore bien oscillant. Nous savons que la période de calcul influe grandement sur la stabilité d’un système. Nous la diminuons de 5 millisecondes à 1 milliseconde. Les résultats sont flagrants.

Réudction du pas de temps
La montée brusque suivie de l’atteinte de la valeur finale par une montée bien plus lente laisse supposer que notre gain proportionnel (P) est trop faible par rapport à notre gain d’intégration (I). Ayant gagné en stabilité en réduisant le pas de calcul, nous pouvons augmenter le gain P (en le doublant).
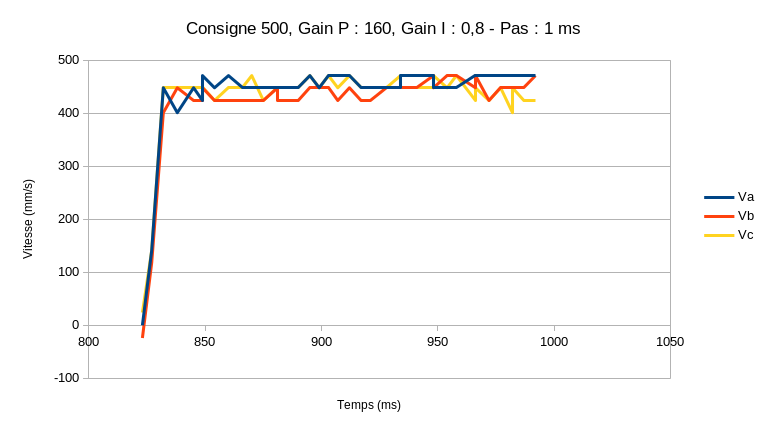
ré-augmentation du gain P
En conclusion, nous noterons que nous obtenons des résultats très corrects sans peaufiner les gains. Nos principaux ajustements ont été de multiplier ou diviser par 2, 5 ou 10 les gains.
Mots clés : Essais, Photo, Robot holonome, 2023
Pour la rentrée 2022...
31 août 2022
Bon ici, petit coup de mou. Le forum des associations de notre ville est prévu pour ce week-end... Nous espérions tenir un stand afin de recruter quelques membres et monter un club de robotique...
Nous avons appris vendredi dernier qu’il fallait être une association pleinement constituée pour pouvoir participer au forum 🙁 ...
Nous avons bien déposé tous les documents pour constituer une association vendredi dernier, à la Rache, mais nous ne croyons pas trop obtenir tous les documents ET convaincre la mairie de nous trouver un stand avant samedi prochain…
Bref, si vous êtes près de Riom (63200) et que la robotique vous intéresse, contactez-nous !
Pour l’occasion nous essayons d’avoir deux démonstrateurs pour montrer la différence de cinématique entre un robot différentiel et un robot holonome.
Pour l’instant, seul le démonstrateur différentiel est prêt...

Demonstrateur différentiel - dessus
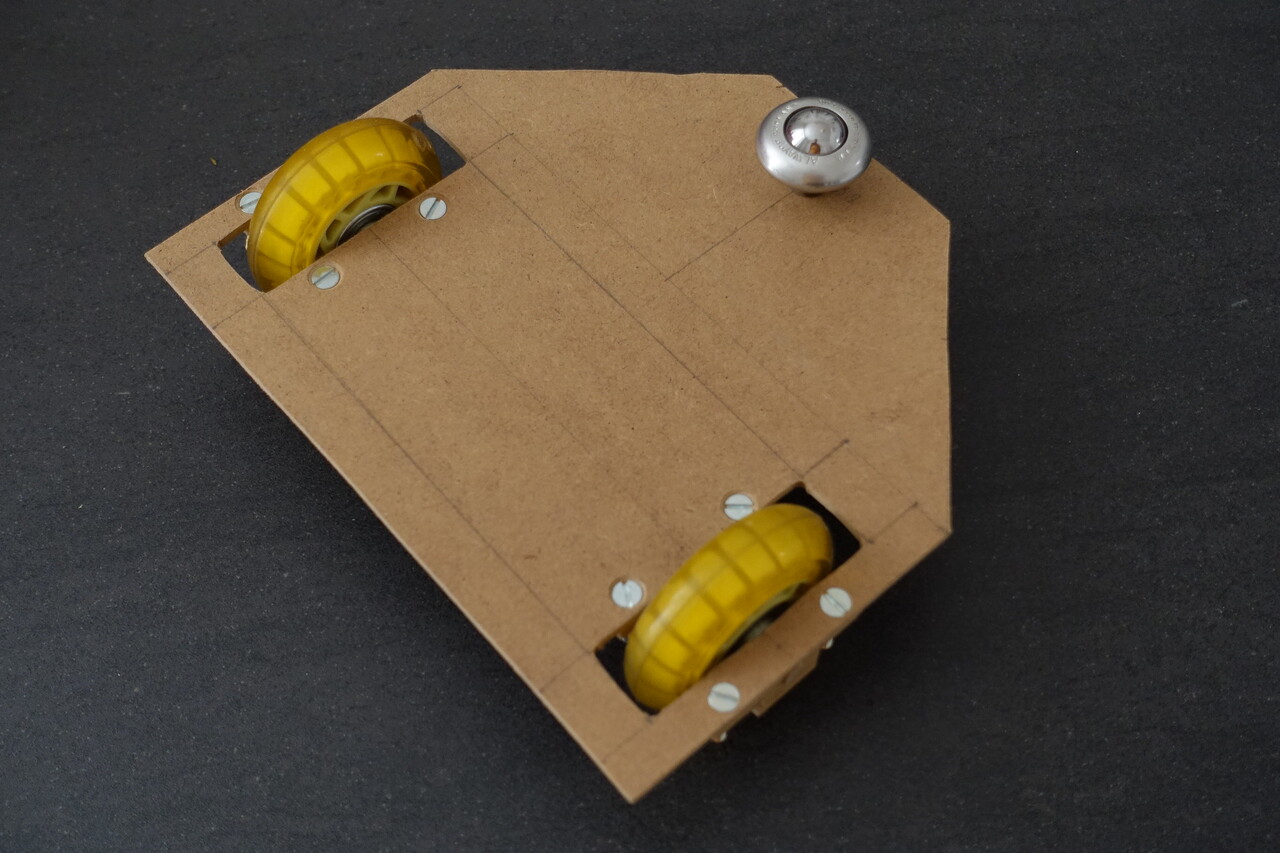
Demonstrateur différentiel - dessous
Le démonstrateur holonome a pris du retard, car nous avons égaré des pièces chez nous, les accouplements des roues...
Du coup, en attendant de retrouver les pièces 😕 , nous travaillons sur la théorie de la localisation d’un robot holonome à partir des codeurs des moteurs. Article en cours avec (attention, teaser) de la trigo, des tenseurs cinématiques et des matrices - pour public averti !
Mots clés : Photo, Pedagogique
Les activités de l’été 2022
21 août 2022
Après la coupe, c’est souvent calme. Il a fallu rentrer, ranger, ranger et ranger. Nous avons passé un peu de temps à préparer les articles et les vidéos de nos matchs et toute la vie quotidienne qui nous avions laissée en suspend revient... Bref, il a bien fallu deux mois avant de pouvoir recommencer un peu de robotique.
Dans les dates importantes à venir, il y a la présentation du règlement Eurobot 2023, le 10 septembre 2022. Vous avez quelques informations sur le site CoupeDeRobotique.fr et le lien de la diffusion sur Youtube, ici.
D’un point de vue plus local, nous espérons avoir un stand au forum des associations de la ville de Riom, qui aura lieu le 4 septembre. En prévision de cet évènement, nous préparons quelques démonstrateurs.
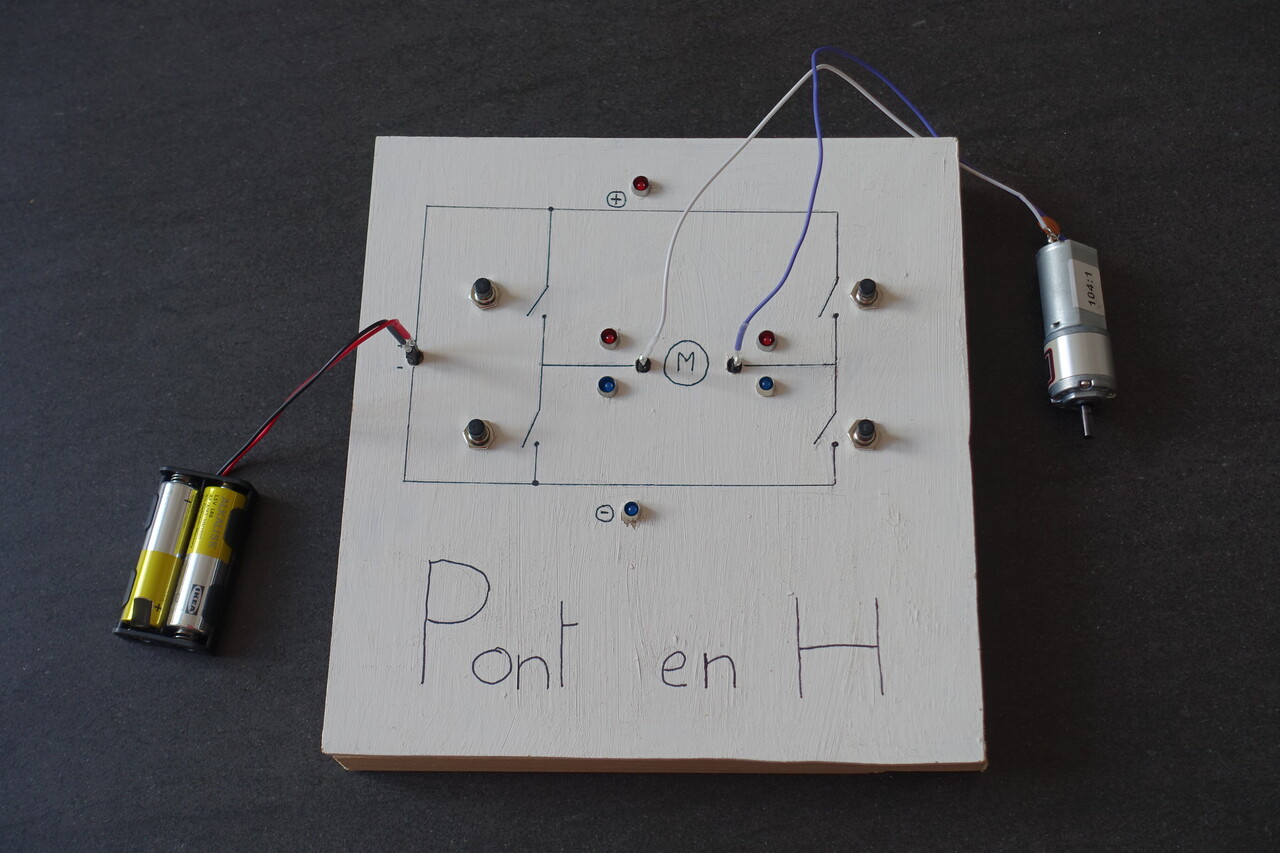
Le plus abouti est celui pour le pont en H. L’idée c’est d’avoir d’un côté un moteur avec une pile, où les gens peuvent constater que la moteur change de sens de rotation en fonction de la polarité. De l’autre, d’avoir ce démonstrateur qui a deux modes de fonctionnement :
- Sans moteur branché, il est possible d’appuyer sur tous les boutons sans créer de court-circuit et de voir la propagation de la tension.
- Avec le moteur, (malheureusement sans protection), où en appuyant sur les bons boutons, il est possible de piloter le moteur dans les deux sens.
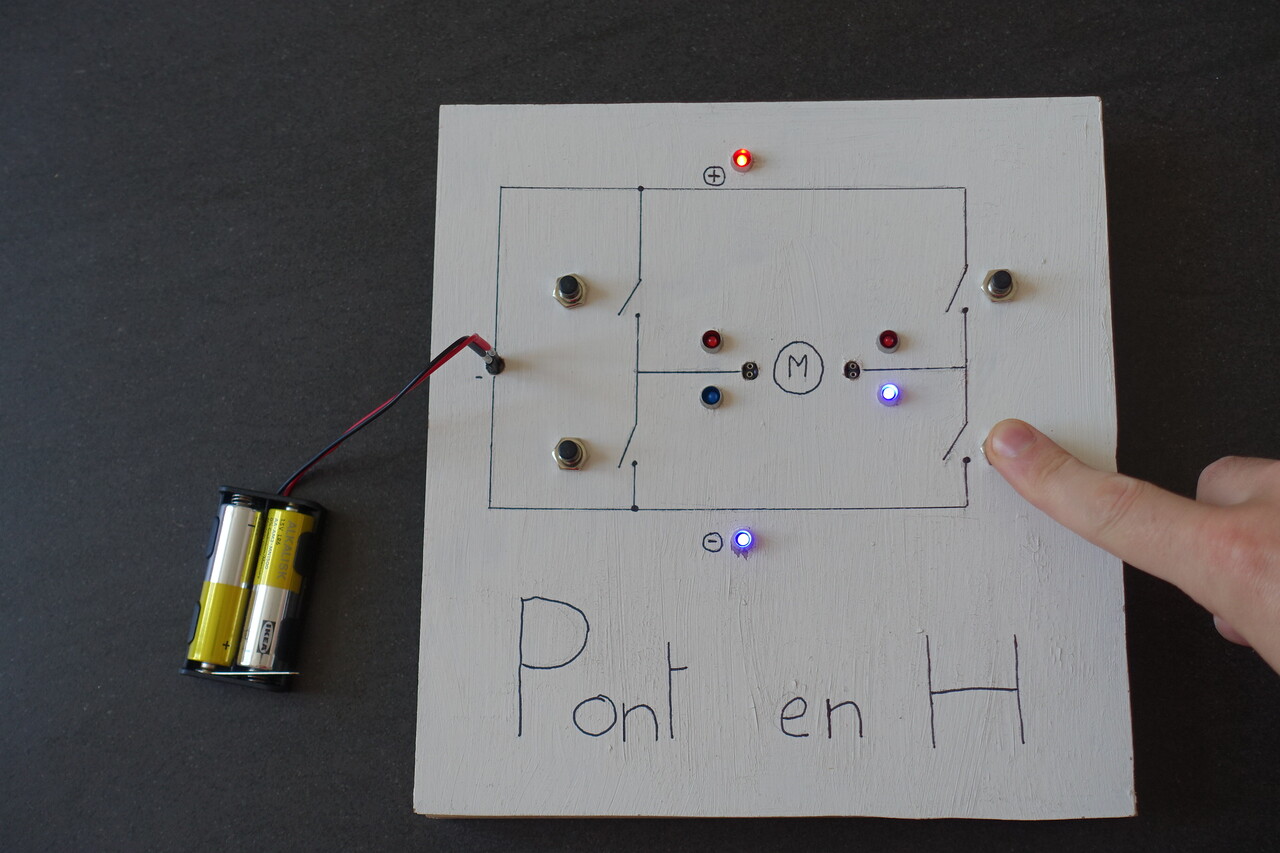
Demonstrateur "Pont en H"
Démonstrateur "Pont en H" avec le moteur

L’actuce pour éviter les court-circuit à vide.
Nous prévoyons également deux châssis avec des roues, pour présenter les problèmes de cinématique. Mais ce sera probablement l’objet d’un autre petit article.

C’est quoi ?
Mots clés : Électronique, Photo, Robot holonome, Pedagogique
Arrivée et homologation - Coupe de France 2022
4 juin 2022
Arrivée
Nous arrivons mercredi, peu après 10h et prenons place avec les équipes qui attentent déjà devant l’entrée.
Vers 11h, nous commençons à prendre possession de notre stand. Ce sera quasiment notre deuxième maison pour les 4 jours qui viennent, alors autant bien s’installer.

Stand vide (ou presque)
Nous passons donc du temps à lire les différentes documentations fournies par l’organisation, dont le guide du participant. Nous déchargeons notre matériel puis installons les posters.

Stand apprivoisé !
Homologation
Après un repas bien mérité, nous allons affronter les homologations. Les homologations se déroulent en deux temps. Tout d’abord, la partie statique s’assure que le robot respect un ensemble de contraintes telles que :
- la hauteur maximale
- la présence d’un bouton d’arrêt d’urgence
- le périmètre inférieur à 120 cm
- la présence d’un espace pour coller l’autocollant d’identification de l’équipe

Homologation statique
Ensuite la partie dynamique s’assure que le robot est capable de
- gagner un match sans adversaire
- éviter un robot adverse
Notre homologation se déroule sans soucis majeur. Un léger désaccord sur la dimension de notre statuette nous obligera à la faire recontrôler après l’avoir légèrement retaillée.
Préparation du match
Notre premier match ne sera que le lendemain, le jeudi. Mais nous avons quand même un ou deux détails à régler.
Tout d’abord, nous redécorons la statuette qui manquait un peu de panache. Les arbitres nous avaient demandé de mieux identifier le bouton stop, celui-ci étant un peu près du mât balise. Ce que nous faisons.
Dans la soirée, nous abordons un autre soucis. Le robot dépose systématiquement la réplique sur le côté de sa zone de dépose. C’est un point que nous avions noté avant de partir de chez nous, mais nous préférions avoir un terrain officiel s’il fallait corriger finement une trajectoire du robot.
Les essais sont formels, le problème est parfaitement symétrique. la correction est simple et s’applique aux deux côtés de la même manière.

Dépose de la réplique
Nous sommes donc sereins en cette fin de journée.
Mots clés : Coupe, Eurobot 2022, Photo
Administration du site