Codeurs et asservissement des moteurs
29 novembre 2022
Ce week-end, nous avons changé le châssis en medium 3 mm (cassé) par un châssis en contre plaqué de 5 mm. En démontant les moteurs nous en avons profité pour installer les codeurs à l’arrière des moteurs. En effet, nos moteurs sont équipés d’un axe arrière dédié à la fixation d’un codeur.
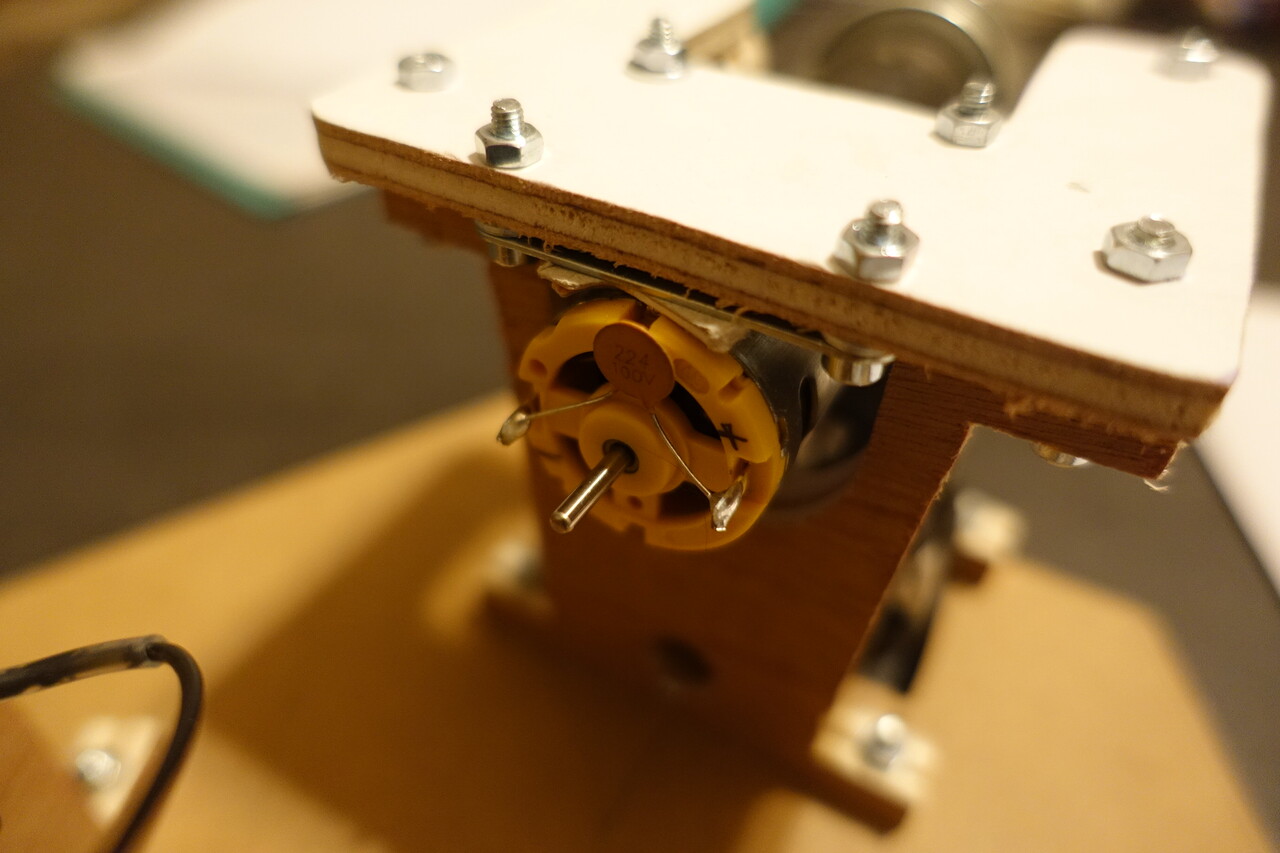
Axe arrière du moteur
C’est sur cet axe arrière que nous fixons notre codeur en kit.

Codeur en kit
Pour ceux qui ne connaissent pas trop le fonctionnement de la roue codeuse, il s’agit d’une petite diode qui va éclairer un disque strié. Un récepteur va détecter la variation de lumière due aux stries et ainsi compter le passage des stries. En ajoutant un léger décalage avec un second capteur, il est possible de déterminer le sens de rotation du disque. Quelques informations supplémentaire par ici.
Voici notre disque en détail, c’est quand même une jolie pièce !

Disque du codeur
Une fois l’ensemble tout remonté, nous revérifions que la lecture des codeurs et le pilotage des moteurs fonctionnent bien. Une petite surprise nous attendait sur le moteur 3, un court-circuit maintenait la broche PWM à la masse...
Bref, le robot était presque prêt à faire ses premiers tours de roue. Dernière étape avant un déplacement sommaire, l’asservissement des moteurs.
Asservissement des moteurs
Voici notre démarche pour régler notre asservissement. Notez qu’il s’agit d’un processus itératif et que nous nous arrêtons dès que le résultat nous semble correct. Nous ne sommes pas allés chercher l’optimisation !
Pour nos essais, nous fixons une consigne à 500 mm/s et un gain P arbitraire.

Réglage initial
L’oscillation montre un gain trop fort. Nous le divisons par 2.

Première réduction du gain
Observons la valeur finale, de 350 à 400 mm/s. Nous ajoutons un intégrateur pour améliorer la précision de l’asservissement.

Ajout de l’intégrateur
Nous sommes plus près de 500 mm/s, mais ça oscille énormément. Nous divisons par 10 le gain de l’intégrateur.

Diminution de l’intégrateur
Le début semble encore bien oscillant. Nous savons que la période de calcul influe grandement sur la stabilité d’un système. Nous la diminuons de 5 millisecondes à 1 milliseconde. Les résultats sont flagrants.

Réudction du pas de temps
La montée brusque suivie de l’atteinte de la valeur finale par une montée bien plus lente laisse supposer que notre gain proportionnel (P) est trop faible par rapport à notre gain d’intégration (I). Ayant gagné en stabilité en réduisant le pas de calcul, nous pouvons augmenter le gain P (en le doublant).
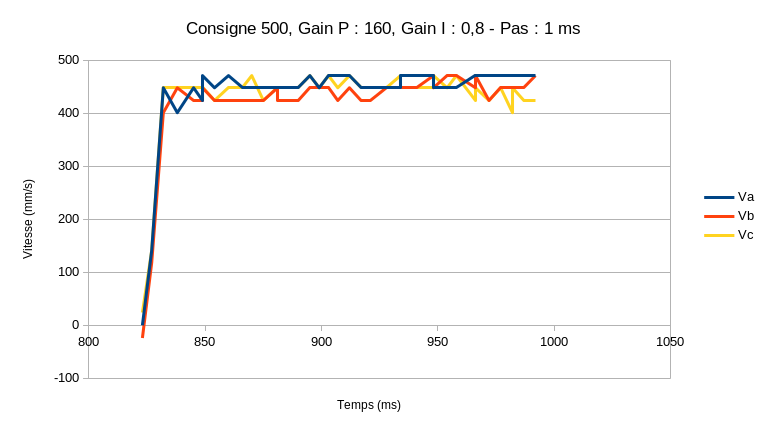
ré-augmentation du gain P
En conclusion, nous noterons que nous obtenons des résultats très corrects sans peaufiner les gains. Nos principaux ajustements ont été de multiplier ou diviser par 2, 5 ou 10 les gains.
Commentaires
Il n'y a pas de commentairesAjouter un commentaire
Administration du site