Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !
Dernières nouvelles
Tourelle
7 octobre 2014
Voici quelque temps que nous n’avions pas donné de nouvelles. Bien que nous fonctionnons actuellement au ralenti, nous ne sommes pas inactifs pour autant.
Nous développons une tourelle de détection de l’adversaire. Un faisceau lumineux est envoyé sur les catadioptre posés sur l’adversaire. La tourelle doit permettre de projeter le faisceau lumineux du capteur tout autour du robot. Ce système servira à activer ou désactiver les capteurs ultrasons en fonction de la proximité de l’adversaire.
Le lecteur CD
Nous avons commencé par démonter un lecteur de CD-Rom pour y extraire le moteur d’entrainement du CD. Nous découvrons - avec horreur - un moteur brushless. Tenant à utiliser ce moteur nous développons une carte à base de A4941. C’est un échec, le pilote A4941 n’est pas adapté à notre moteur et c’est à peine s’il arrive à entraîner ce dernier.
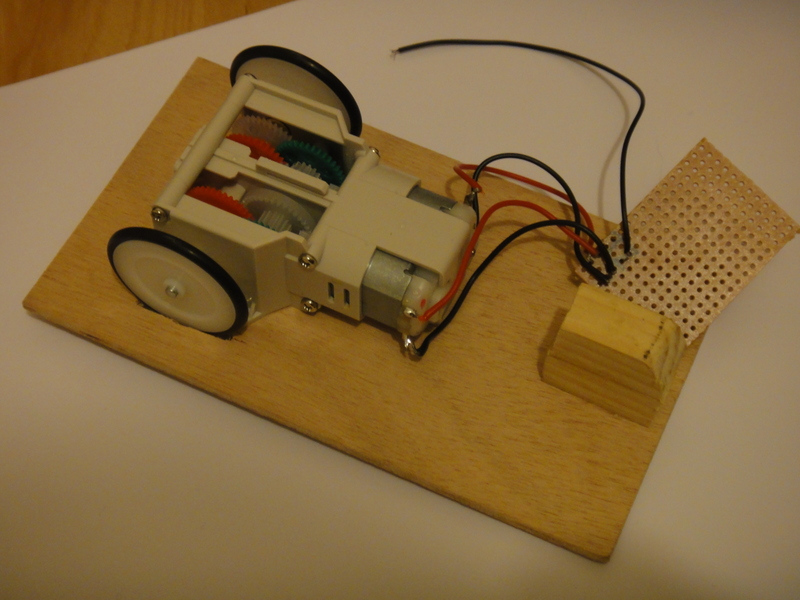
Le ventilateur
Nous nous rabattons sur un ventilateur. indiqué pour 5V, nous l’alimentons en 10V. Le ventilateur tourne. Nous y fixons une petite planche de bois et une languette en papier qui passe au travers d’une fourche optique pour compter les tours. Nos premiers relevés montre que nous ratons une fois sur 10 le signal de la fourche optique. À 20 tr/s, ce n’est pas grave, à condition de le savoir.
D’un tour sur l’autre, nous ne mesurons qu’une variation de 3% pour la durée d’un tour. C’est largement suffisant pour nos besoins. Seul petit inconvénient, notre mécanique n’est pas équilibrée et le système vibre un peu...
La suite prochainement...
Mots clés : Projet
Présentation de Rustique
11 juillet 2014
Rustique est notre robot qui a participé à la coupe de France de robotique 2014. Pour la première fois nous dotions un de nos robots de codeurs. Nous avons réalisé une nouvelle carte électronique et découvert un nouveau microcontrôleur.
Ce que nous vous livrons, dans la présentation de notre robot, est quelque chose de rare, peut-être même d’unique. Nous dévoilons notre planning ! Et attention, il ne s’agit pas d’un mensonge honteux, généralement camouflé sous l’appellation "planning prévisionnel". Non, il s’agit du planning réel, reconstruit à partir du journal intime du robot et des logs de notre gestionnaire de version (Git).
3 mois sans nouvelles, aïe !
21 janvier 2013
C’est la date limite pour rendre les projets (merci le forum de planète-sciences) qui nous a sorti de notre torpeur. On s’est quitté il y a 3 mois et la conception du robot n’avait pas beaucoup avancé.
Depuis, il ne s’est rien passé. Enfin rien du coté du robot. Du coup, on oublie pour l’instant les mécanismes sophistiqués, on revoie notre stratégie et même nos principes et on repart sur une nouvelle base.
C’est un mélange de plusieurs réflexions qui trainaient :
- Et si on concevait un seul robot pour en construire deux ?
- Que nous apporte l’utilisation du gyroscope ?
Tout ça nous a amené à l’idée suivante.
Et si on faisait un robot avec ça :
Base roulante 2013
Oui, il faut une petite base roulante pour qu’elle convienne aux deux robots. Grâce au gyroscope, la précision de la mécanique n’a pas besoin d’être extraordinaire. Et on a même idée de mettre un semblant de roue codeuse. Pour ceux qui veulent en savoir un peu plus, voici notre dossier projet :

Nous avons un petit paragraphe pas très élégant pour expliquer au jury qu’on savait à peu près ce qu’on faisait et que oui, on était au courant qu’on était à la bourre.
Mots clés : Conception, Coupe, Projet
Carte pour le contrôle d’un moteur
1er octobre 2012
Le règlement de la coupe de France de Robotique a été publié et nous avons du travail !
Le règlement propose 5 types d’actions :
- Pousser des cadeaux
- Éteindre des bougies
- Lancer des cerises
- Empiler des verres
- Gonfler des ballons
Cette année, en plus d’actions nombreuses et variées, les robots sont plus petits. Cette contrainte mécanique obligera presque toutes les équipes à renoncer à certaines actions. En ce qui nous concerne, nous abandonnons la manipulation des cerises qu’il faut lancer.
Le petit robot s’occupera des cadeaux et de gonfler les ballons.
Le grand robot s’occupera des bougies et des verres.
Nous avons du travail, alors ne trainons pas. Voici notre carte de contrôle de moteur.
Mots clés : Conception, Coupe, Électronique, Projet
Maîtrise et puissance
11 août 2012
La solution de motorisation de l’an dernier ne nous a pas totalement satisfaite. Le moteur pas à pas vidait la batterie en consommant 2 A en continu, son couple était trop faible pour éviter un saut de pas lors d’un choc. Le moteur de propulsion nous autorisait une faible vitesse de pointe et la vitesse de déplacement du robot variait en fonction de la charge de la batterie. Ce qui aurait necessité un asservissement en cap à gain variable pour être performant
Pour le moteur pas-à-pas, c’est le prinipe qui ne nous convient pas. On peut tolérer de petits écart de positions, tant qu’il sont connus et corrigés. Nous remplacons ce moteur par un moteur CC avec une roue codeuse.
Pour le moteur de propulsion, nos calculs semblait bon, mais ils ne tenanaient pas compte de la chute de tension du au pont en H (Max : 3V) ! Nous changeons donc nos hypothèses de dimensionnement et diminuons la tension d’alim des moteurs de 3V par rapport à notre tension batterie. Comme nous ne voulons plus être dependant de la charge de la batterie, nous lui ajoutons un encodeur pour controller sa vitesse.
Nos moteurs sont de petits monstre (oui, petits, faites nous confiance, y’en a qu’avait pire cette année). Pour preserver nos pont en H, nous ajoutons une faible résistance en série au moteur pour mesurer l’intensité qui le traverse. Pas question de griller une carte à cause d’un moteur bloqué !
Mots clés : Conception, Projet
page précédente 1 2 page suivante
Administration du site