Sommaire
Présentations de PinceMi et PinceMoi
8 septembre 2012
Les robots sont en cours de construction... En attendant, nous présentons les prototypes.
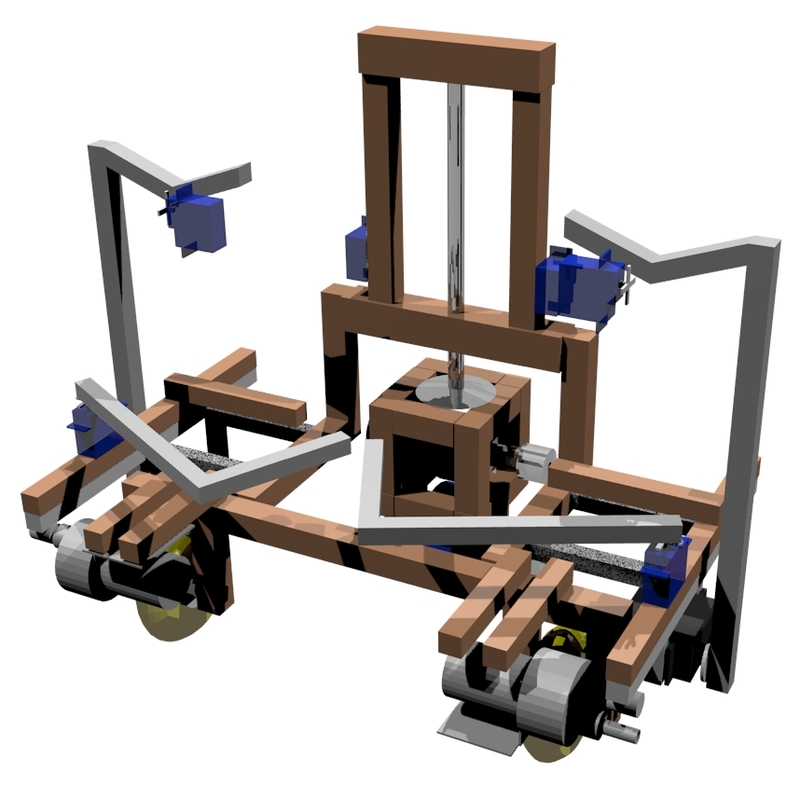
Modélisation du robot
Base roulante
L’architecture du robot en bois est à peu près terminée. Il s’agit d’un tricycle (à trois roues). Les deux roues avant sont de simple roues porteuses écartées de 20 cm et la roue motrice directrice se trouve 10 cm derrière l’axe avant.
Le moteur de traction se trouve au-dessus de la roue motrice, la transmission se fait par courroie. Au dessus se trouve une colonne de direction qui sera orientée par un moteur pas-à-pas (toujours avec une transmission par poulies et courroie). La colonne de direction est en métal car le système en bois que nous avions l’an dernier n’a pas tenu toutes ses promesses.

Base roulant |
Robot plié |
Électronique du robot
Le robot en bois reprend l’intégralité de l’électronique de son prédécesseur. Il possède cependant plus d’actionneurs. Nous lui rajoutons une carte dédiée au contrôle des bras. Cette carte peut piloter 2 moteurs à courant continu, 2 servomoteurs et lire 10 contacteurs. L’électronique pour les contacteur étant la même que pour les servomoteurs ou certains autres capteurs, ceci nous laisse une petite marge de manœuvre.

Prévisualisation de la nouvelle carte
Plans de la carte
- Carte bras : le schéma (sch)
- Carte bras : le typon (brd)
- Carte bras : le schéma (pdf)
- Carte bras : le typon (pdf)
Actionneurs
On retrouve sur le robot le système d’attrape-pièce. Un sur chaque côté. La précision de ce système (quand il arrive à attraper les pièces) devrait nous permettre "d’embrocher" les pièces sur une tige et de basculer la tige pour les déverser. Nous prévoyons d’équiper la pince des attrape-pièces d’une fourche optique pour détecter la présence d’un objet. Ceci devrait permettre de gagner en fiabilité et en efficacité.
Les crémaillère supportant des servomoteurs permettront de récupérer les lingots se trouvant dans les totems. L’idée est de pouvoir coller le robot au totem et de récupérer les deux lingots du totem sans se déplacer. Il ne sera peut-être pas possible de pendre les deux lingots du totem en même temps, car le robot risque de dépasser le périmère autorisé en dépliant ses deux bras simultanément.

Bras lingot déplié |

Bras des attrape-pièces baissés |
Capteurs
Les capteurs ne sont pas représentés. Cependant, nous avons déjà une idée des capteurs que nous allons employer.
Sur les attrape-pièces, nous allons mettre des IS471F pour faire notre fourche optique qui détectera la présence d’une pièce à récupérer.
À l’avant de robot, nous fixerons 4 contacteurs qui nous garantiront que nous sommes bien au contact du totem et pas légèrement sur le côté. D’autres contacteurs permettront de connaître la position de la crémaillère.
Nous utiliserons une CMUcam pour trouver les éléments de jeu (pièces, totem). Le gyroscope nous permettra d’avancer droit, notamment lorsque le robot ne suit pas un objet à l’aide de la CMUcam. Enfin un système de balises nous permettra de connaître notre position approximative sur le terrain et ainsi d’aller vers le bateau. Ce même système de balises nous permettra peut-être de détecter le robot adverse, sinon, nous utiliserons un ou deux capteurs soniques.
Conception des actionneurs
Afin de finir la modélisation de notre robot, nous choisissons les actionneurs que nous allons utiliser. Plus d’information sur nos réflexions de dimensionnent ici !
Réalisation
Attrape pièces
Notre premier protoype de l’année. C’est l’histoire d’un servo qui tient un autre servo... Pour tenir un CD !
Base Roulante
Elle n’est pas encore terminée, mais voici quelques images de sa fabrication.
Ce sont les roues porteuses avant que nous avons réalisées en premier. Pas de très grosse difficulté, nous avons juste pris un pied à coulisse pour s’assurer que les montants verticaux avaient tous la même cote entre le trou du perçage pour l’axe et le haut du montant.

Axe des roues avant du robot
C’est étonnant, mais cet effort fut payant : l’angle entre la barre parallèle à l’axe et le sol n’est que de 6*10-4 radian, soit 1*10-4 degré. L’inclinaison ne se voit pas avec un niveau à bulle.
Nous avons ensuite percé les poulies et le moyeu de la roue motrice. N’ayant pas notre outillage, nous sommes allés à l’atelier de Planète Science pour réaliser ces trous à la perceuse à colonne. Des petits problèmes d’étaux font que les trous ne sont pas tous très centrés, l’un pourrait même être décrit comme catastrophique, mais ça fera l’affaire.

Perçage des poulies et du moyeu de la roue motrice
Puis nous nous sommes attaqués à la roue motrice. Une cage en bois, un axe de 4 mm et hop !

Notre précieuse roue motrice
La barre métallique, qui servira d’axe vertical de rotation à l’ensemble moteur, a été récupérée sur un pistolet à joint. Sur la pièce de l’an dernier, nous avions eu des problèmes de rigidité. Nous aurons certainement d’autres problèmes cette année, mais pas celui-là ! Notre axe, en acier, fait 8 mm de diamètre.
Il ne manquait plus que quelques collages sur l’axe arrière pour avoir une base qui tient debout.

Base roulante (vue de face) |

Base roulante (vue de dessus) |
Il manque encore le moteur pas-à-pas qui assurera la direction du robot. Sa fixation n’est pas l’étape la plus simple, mais elle ne saurait tarder.
Voila le moteur pas-à-pas fixé ainsi que les moteurs qui déployeront les bras avides du robot.

Base roulante et moteurs des bras |

Base roulante et moteurs des bras |
Attrape Lingot
Les réglages ne sont pas encore terminés, mais voici une vidéo de notre attrape-lingots gauche. Le droit est en court de finalisation
Pseudo Homologation
Nous n’avons pas encore travaillé l’approche du totem, mais on commence à voir les capacités du robot sur cette vidéos.
Téléchargement : mp4 - 720p - 18 Mo | mp4 - 1080p - 18 Mo
Sur la vidéo, le robot avance droit pendant une seconde puis se tourne de 45° vers la droite (ces deux actions se servent du gyroscope). Le robot repère le CD avec sa caméra et se laisse guider par la caméra pour attraper le CD. lorsque le CD entre dans la pince, il coupe un faisceau lumineux. La pince attrape le CD, puis le robot tourne pour avoir un cap de 135° par rapport à sa position de départ. Il repère ensuite le lingot avec la caméra et vient le pousser délicatement. Le robot tremble un peu parce qu’il n’y a pas de pare-choc et que le lingot bloque une roue.
Commentaires
Administration du site
Luj, le 1er/11/2011
Sympa, mais vous ne pensez pas qu’il sera difficile de saisir les CD avec une surface de contact si petite ?
POIVRON, le 1er/11/2011
C’est un peu cette crainte qui nous fait commencer les essais si tôt. Les tests sont plutôt concluant, mais dans le cas contraire, nous espérions trouver un moyen de recouvrir les mors de la pince d’une matière plus adhérente que le bois (type caoutchouc).
jbot_SMART, le 15/01/2012
Je trouve ca un poil risqué aussi cette petite pince. On voulait faire une pince aussi au début puis on a abandonné l’idée finalement.
Julian Serinus, le 19/01/2012
Bonjour à nos voisins de stand de l’an dernier !
Avec quel logiciel avez vous réalisé le PCB de la carte électronique ?
Cordialement,
POIVRON, le 19/01/2012
La pince, on fait un peu ça pour la beauté du geste, mais j’espère que ça va marcher. Nous pensons qu’en se servant de la CMUCam pour la détection des objets, nous pouvons avoir la précision nécessaire pour saisir une pièce.
@Nos_très_chers_poussins : Pour les cartes électroniques, nous nous servons d’Eagle de Cadsoft. Leur licence gratuite permet de faire tout ce dont, nous, nous avons besoin. Eagle3d permet de faire de beaux rendus.
Klean, le 3/03/2012
Euh la video d’attrape lingot ne marche pas chez moi ... ?
POIVRON, le 4/03/2012
Ça devrait maintenant marcher. La vidéo n’était pas encodée comme il fallait pour internet explorer...
J’espère que ça marche maintenant pour tous les navigateurs.
Klean, le 4/03/2012
Super ça marche ! Excellente idée d’attrape lingot : 2 en un !! ENORME !!
POIVRON, le 5/03/2012
Merci pour ce commentaire enthousiaste ! Il faut encore que nous arrivions à nous positionner devant le totem. Ce qui, vu notre système, ne sera pas forcément facile.
Ajouter un commentaire