Présentation du robot POIVRON
8 septembre 2012
POIVRON est l’acronyme de "Petit Outil Intelligent Voué à la Récolte d’Objets Nutritifs". Il rentre dans une boîte à chaussure et ne pèse que 1,6 kg. Il avait de quoi trembler devant un adversaire plus lourd que lui ! Mais face aux tomates, il est courageux !!
Le robot ne pouvait qu’attraper une seule tomate avec sa pince et de la déposer dans le panier.

Poivron
Construction du robot POIVRON (2009-2010)
La mécanique
Poivron est construit sur la base d’un tricycle, le train arrière est un axe sur lequel sont montées deux roues de roller avec leur roulement. L’axe est en bois, il est collé à un châssis en bois qui fera office de porte-batterie
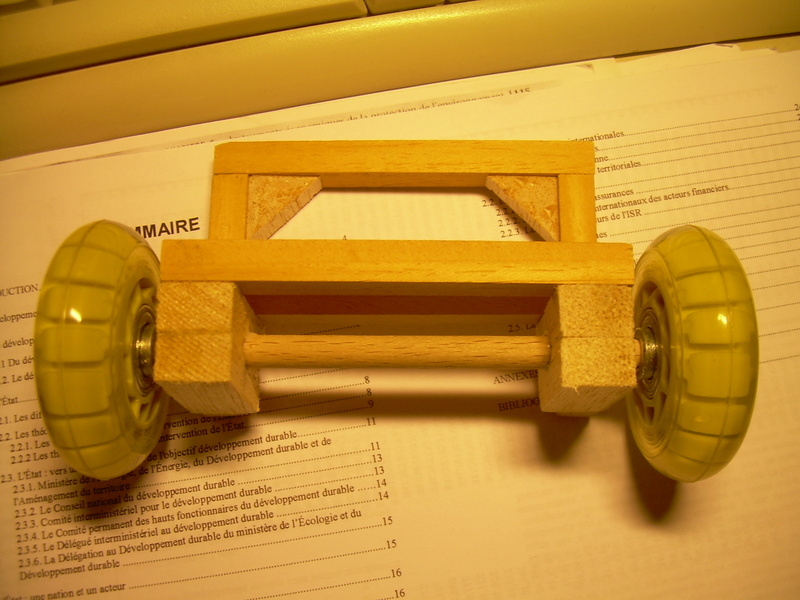
Axe arrière
La roue motrice est directement accouplée au moteur. Cet ensemble étant particulièrement déséquilibré, la roue porteuse a été rajoutée de l’autre côté du moteur. L’ensemble avait une forme bien différente, que le robot avance droit ou tourne sur lui-même.
Une roue de roller montée à l’horizontal assurait la liaison pivot entre le bloc avant de traction et le reste du châssis à l’arrière

Robot déplié, prêt à avancer droit |

Robot plié, prêt à tourner sur lui-même |
Le reste de la mécanique a été construit au fur et à mesure que les besoins se faisaient sentir. D’abord une pince latérale pour saisir les balles, puis des supports pour capteurs à l’avant pour ne pas tomber dans un trou. Et enfin, une structure qui s’élève pour accueillir la CMUcam (la caméra) et le mât balise. La caméra pouvait bouger, mais cette fonction n’a jamais été utilisée, même pendant les essais.

Le robot presque construit
Actionneurs
Le robot est tracté par une roue motrice directrice. La roue est entraînée par un motoréducteur MFA 980D avec un rapport de réduction de 47:1. le moteur alimenté en 9V développait une puissance de l’ordre de 4 Watt. L’ensemble "roue + moteur" est orienté par un servomoteur plutôt standard HS-322HD. Le robot étant léger, le servomoteur était largement suffisant. Le moteur pouvait tirer le robot à une vitesse de 30 cm/s.
Le robot est équipé de trois servomoteurs, de modèle identique. Le premier sert pour la direction, le deuxième actionne la pince tandis que le troisième permet de faire tourner le bras qui tient la caméra.
Et c’est tout...
Capteurs
Le robot est muni de 4 capteurs IS471F. Ce sont des capteurs infrarouges avec une sortie binaire. Ils renvoient 1 si leur champs de vision est dégagé, 0 s’il y a un obstacle. Ils étaient utilisés pour réaliser deux fonctions.
- La première, repérer la balle lorsque le robot passait à proximité.
- La seconde, éviter que le robot ne tombe dans le trou au bord de la table.
Les capteurs étaient montés de manière rudimentaire, insérés dans une fente du bois, serrés contre leur support par des liens, au niveau du connecteur

Fixation des capteurs
Les deux capteurs qui détectent la balle sont positionnés horizontalement et ont une portée de près de 15 cm. Lorsque le faisceau du premier capteur est coupé, le robot continue d’avancer jusqu’à ce que le premier faisceau soit libéré et le second coupé. Là, il tourne à droite. En tournant, il se rapproche de la balle. Soit la balle était assez loin, auquel cas le faisceau avant est à nouveau coupé. Le robot recommence alors sa manœuvre, il se trouve alors un peu plus près de la balle qu’avant. Si la balle est proche, celle-ci va toucher le robot. Le robot serre sa pince et attrape la balle.
Les deux autres capteurs sont situés à l’avant de la roue motrice. Il sont orientés vers le bas. S’ils ne détectent plus le sol, c’est que le robot doit immédiatement s’arrêter.
Le robot est équipé d’une CMUCam. Il s’agit d’une caméra qui communique par une liaison série. Elle sert à trouver les objets à ramasser, notamment les tomates qui étaient symbolisées sur la table par de grosses balles rouge.
Un capteur à ultrason permet de détecter les obstacles et de les approcher en douceur.
Le robot est aussi équipé de contacteurs : l’un à l’avant pour détecter les obstacles, un autre sur le côté pour détecter la présence de la balle.

La pince et ses capteurs |

Détection : obstacles et chute |
Électronique
Le robot ne comportait qu’une seule carte électronique. Cette carte était construite autour d’un PIC 18f2550 qui pilotait un pont en H L293NE. La carte gérait directement tous les capteurs et tous les actionneurs.
Programmation
La caméra est programmée pour envoyer les coordonnées de la plus grande figure rouge repérée. La caméra devait initialement repérer d’autres éléments de jeu afin de s’en servir comme repère pour permettre au robot de suivre son itinéraire. Ces éléments de jeu sont soit blanc, soit noir. Le blanc est particulièrement dur à repérer car il est très facilement coloré par les couleurs qui l’entourent.
Le PIC pilote les servomoteurs en se servant des interruptions. La réception des données se fait aussi en interruption. Ces deux routines en interruption font que les servomoteurs tremblent un peu. Alors que le code initialement envisagé faisait passé le robot par un chemin compliqué afin qu’il attrappe sa balle au plus près de la zone de dépose, le code final ne le fait qu’avancer droit vers la zone de dépose en poussant les balles qui pourraient se trouver sur son passage.
Une vidéo qui montre comment le robot était censé lâcher la balle.
Stratégie utilisée pour notre unique match :
- Le robot avance à peu près droit pendant une à deux secondes.
- Le robot passe en mode de recherche de balle, il est guidé par la caméra. Il s’approche de la balle jusqu’à ce que la balle entre dans une certaine zone sur l’image de la caméra.
- Le robot s’arrête, recule, s’arrête à nouveau, se positionne face à la balle (toujours avec la caméra) et avance vite pendant trois secondes.
- Le robot repasse en mode de recherche de balle et recommence la procédure.
- Si tout se passe bien, l’une des balles tombe dans le panier.
Une dernière vidéo qui offre de bons angles de vue pour comprendre la mécanique du robot.
Commentaires
Il n'y a pas de commentairesAjouter un commentaire
Administration du site