Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !
Dernières nouvelles
La coupe de France de Robotique 2024 - la fin de la préparation
14 mai 2024
Et voilà, c’est terminé... Après 4 jours de défis intenses, de stress et de rencontres sympathiques nous voici de retour chez nous. Mais que s’est-il passé durant ces quatre jours ? Et pourquoi ?
Pour répondre à ces questions, nous allons reprendre l’histoire au 23 avril.
J-14 avant la compétition
Bien que nous ne l’ayons pas publié, nous avions également réalisé des essais pour attraper les plantes. Ces plantes sont des éléments assez sensibles, il est facile de les coucher. Elles ont aussi la fâcheuse manie de se regrouper lorsque le robot se rapproche (il les pousse). Une fois regroupées, il n’est plus possible de les attraper avec la pince à 3 doigts. Le robot en prend 2 ou même trois et ça devient le bazar.
Nous fixons alors un petit doigt sous le châssis pour saisir la plante, la reculer et l’isoler de ses congénères. Cette solution améliore grandement la saisie des plantes.
Nous avons donc une saisie des pots qui marche et une saisie de plante qui n’est pas affreuse.
J-10 avant la compétition
Nous faisons quelques démonstrations devant des amis, il parait maintenant flagrant que le robot n’attrape correctement une plante qu’une fois sur 3 ou 4. Pire, s’il n’attrape pas la plante, il part doucement dans le décor. Nous profitons d’un après-midi pour identifier les défaillances et gérer ces cas plus proprement.
Nous avons maintenant un robot qui rentre à une zone de dépose dans quasiment tous les cas, avec ou sans plantes...
J-8 avant la compétition
Nous rajoutons les bordures au terrain - regardez la vidéo précédente, vous verrez que les pots ne sont pas bloqués par la bordure. Ceci nous oblige à retravailler un peu la séquence de prise des pots. Notre mécanique est loin d’être parfaitement symétrique, nous réglons alors la distance de prise des pots pour chaque bras.
De plus, nous avions un système de calage automatique du robot : nous le posions sur le terrain dans une orientation approximative et il se mettait tout seul en position grâce à son capteur. Nos essais nous ont montré que ce système n’était pas assez répétable. Le robot pouvait se décaler jusqu’à 2 centimètres - rédhibitoire pour attraper les pots !
Petite mésaventure, un fil du câble d’un servomoteur se détache du servomoteur : démontage sur servomoteur, ouverture du boîtier, re-soudage du fil, remontage et noyage du tout dans le pistocolle...

Câble du servomoteur
Et voilà, il ne nous reste plus qu’un week-end avant la coupe et nous sommes loin d’enchaîner les essais pour fignoler la stratégie.
J-4 avant la compétition
Notre code se compose d’une vingtaine de cas de test, qui nous ont permis de travailler jusqu’à présent. Maintenant, nous devons absolument commencer le code principal, tenant compte de la "couleur" du robot - qui influe sur sa position de départ - et de la tirette - qui conditionne le départ du robot. Des "détails" qui peuvent réserver leurs surprises.
Mais avant, nous avons un dernier mouvement à programmer. Le robot est conçu pour pouvoir lâcher ses pots, tourner sur lui-même et les re-saisir. Du moins c’était notre ambition initiale. Quelques essais montrent que ce ne sera pas possible exactement comme ceci. Lorsque le robot lâche un pot, celui-ci s’éloigne du robot. Les bras sont alors trop courts pour récupérer les pots sans déplacer le robot. Vu la situation, nous travaillons sur un échange entre les deux pots avants (potentiellement remplis d’une plante) avec les pots arrières.
Dans l’après-midi, nous organisons une séance PAMI. Avec de l’aide, nous découpons les dernières pièces des PAMI, soudons les câbles, assemblons les petites bêtes. Mais la tâche est un peu plus ardue que prévu, la carte électronique ne se monte qu’en force et il faut dessouder une broche du microcontrôleur à cause d’un problème de conception de la même carte.

Nous finissons la journée avec des PAMI montés mais pas testés...
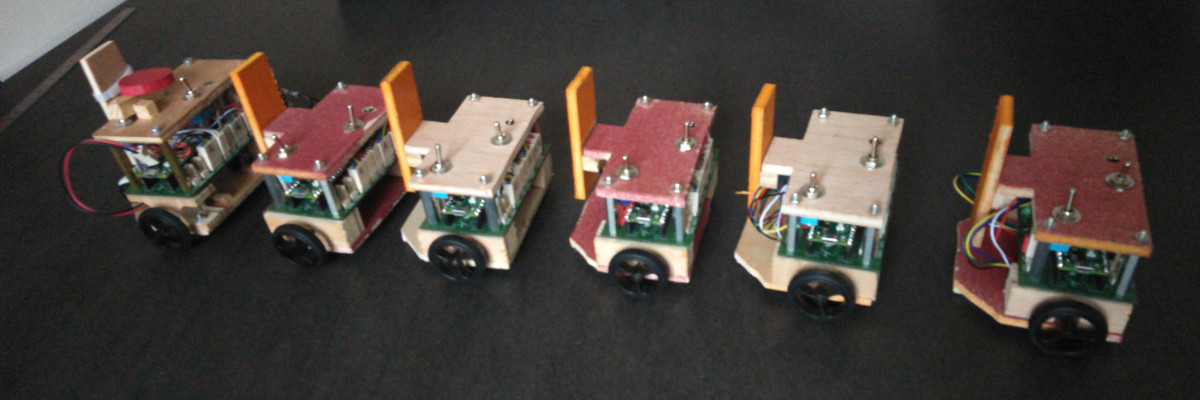
Les PAMIs juste avant le départ
J-3 avant la compétition
Nous enchaînons les essais et le comportement du robot se dégrade, essai après essai. Il n’arrive plus à lâcher les pots, les servomoteurs n’ont plus la force de décoller les aimants des pots. Puis même à vide, les doigts ne bougent plus. Les servomoteurs des doigts, ceux qui font avancer et reculer les aimants se mettent à "croustiller". Nous remplaçons nos servomoteurs à pignons en plastique par des servomoteurs avec des pignons métalliques.
Puis l’un servomoteur à pignons métalliques refuse de bouger, ou a la tremblotte à certains moments. Nous vérifions les branchements plusieurs fois, ce qui semble améliorer la situation. Avant qu’elle n’empire à nouveau.
Nous contrôlons alors la mécanique des doigts et, effectivement, certains doigts forcent plus que d’autres. Nous corrigeons ceci en ajustant la forme du fils de fer qui guide l’aimant tenu par le servomoteur. Et la situation s’améliore...
Autre problème, le translateur, ce bloc qui tient la pince et son ascenseur, qui lui permet de se positionner au-dessus des pots, ne va plus au bout de sa course. Là, il nous faudra qu’une heure ou deux pour comprendre que nous devons re-lubrifier les axes régulièrement. Les axes sont en carbone (baguettes de cerf-volants ) et le translateur en bois. Nous les avions lubrifiées avec du PTFE en bombe. C’est efficace, mais pas très pérenne. Nos gardons quand même cette solution et notant bien de prendre le lubrifiant avec nous. (Il faudra que nous soyons à la compétition pour réaliser que nous ne secouions pas assez la bombe et que nous ne projetions que des traces de PTFE sur les axes du translateur...)
J-2 avant la compétition
Maintenant, il faut vraiment écrire un bout de code pour l’homologation, prenant en compte la tirette et la couleur de départ du robot ! Mais avant, nous réalisons un ou deux tests et nous cassons un morceau de bras !

Bras cassé
La réparation sera heureusement rapide !

Bras réparé - mais pas repeint...
Nous continuons nos essais et rapidement nous avons le robot qui se "plante", moteurs arrêtés, le reste semblant fonctionnel. Nous avions déjà vu ce phénomène mais nous l’avions négligé. Après avoir vérifié la tension de la batterie, nous branchons le PC sur le robot et découvrons avec stupeur que le robot est en train de redémarrer. En réalisant ce branchement, nous frôlons le régulateur de tension qui nous parait excessivement chaud par rapport à la puissance consommée estimée. Après avoir inspecté la carte et ses branchements dans tous les sens, nous modifions deux choses sur le robot :
- Nous alimentons la carte de détection - avec ses diodes RVB - directement depuis notre carte de puissance (et non plus en passant par notre carte principale).
- Nous fixons un radiateur sur le convertisseur de tension.
En fin de journée, nous avons un code qui permet au robot d’attraper les pots, chercher des plantes dans une zone de plante, rentrer à une zone de dépose et déposer ses pots (potentiellement garnis de plantes).
Le code est fiable dans le sens où le robot réalise ces actions sans partir dans le décor. Mais il est loin d’attraper systématiquement une plante !
C’est également le moment de s’assurer que l’affichage du score marche bien... Et c’est un échec. Le code de la gestion de l’écran et celui de la lecture du capteur à l’avant, qui détecte les plantes, semblent entrer en conflit. Vu notre avancement, nous remettons un code qui gère le score, affichons "25 points" sur l’écran e-ink, et rebasculons sur le code qui ne gère que le capteur. Le robot affichera 25 points du début à la fin de la compétition.
J-1 avant la compétition
Fiabilisation du code ? Avancée sur la stratégie ? Que nenni !
Nous chargeons la voiture le matin et voyageons l’après-midi ! Nous avons seulement un peu de temps le soir, qui sera consacré à l’asservissement des moteurs du premier PAMI.
Mots clés : 2024, Coupe, Essais, Mécanique, Mini robot (PAMI)
La rentrée 2023 - club robotique et plantes
1er octobre 2023
Que s’est-il passé lors de cette rentrée 2023 ? Comment avons nous pu rester silencieux si longtemps après la publication du règlement de la coupe de France de robotique ? Tous ces mystères vont vous être révélés ! Mais avant cela, un peu de contexte.
Poivron Robotique est, depuis de longues années, une équipe familiale. Nos deux dernières participations nous ont montré que nous savions réaliser des robots, au moins pour notre compétition fétiche. Sûrs de nos acquis, nous tentons de grossir et de transmettre.
Club robotique de Riom
C’est pourquoi nous avons fondé le club robotique de Riom. La rentrée fut l’occasion de remettre nos deux robots (Capsicum et Hexa) en marche et de tenir un stand au forum des associations de la ville. Bien qu’ayant déjà été (un peu) engagés dans des associations, le démarrage ne fut pas de tout repos, entre la crainte de n’avoir personne, d’avoir trop de membres, de ne pas avoir de local, de ne pas avoir assez de budget... Bref, après avoir dépensé pas mal d’énergie - et peut-être avec un peu de chance - nous trouvons notre public et la mairie nous met à disposition une salle sur un créneau horaire confortable.
Nous partagerons prochainement le lien vers le site de l’association, mais pour l’instant, il faut le créer !
Les plantes
Le règlement de la Coupe de France de Robotique 2024 fut présenté le 9 septembre 2023, sous forme de brouillon. Les points des actions ne sont pas définis et certains détails pourraient changer. Mais en gros, il s’agit d’attraper des plantes, de les mettre dans des pots pour mettre l’ensemble soit dans une jardinière de l’autre côté de la bordure, soit dans une zone de dépose.

Plante et pot
Ce règlement présente deux défis :
- les plantes ne sont pas à des positions fixes, les saisir va demander une bonne détection ou un peu d’astuce ;
- la mise en pot ou la dépose dans les jardinières nécessite un actionneur mobile sur 2 axes. Bref, une mécanique un peu travaillée.
Mais les éléments de jeux légers et nombreux devraient nous inciter à réaliser de beaux mécanismes.
Nous cherchons les premiers mécanisme pour manipuler ces éléments de jeux, mais nous n’avons rien trouvé de satisfaisant pour l’instant. Notre première tentative d’actionneur se présente ainsi :
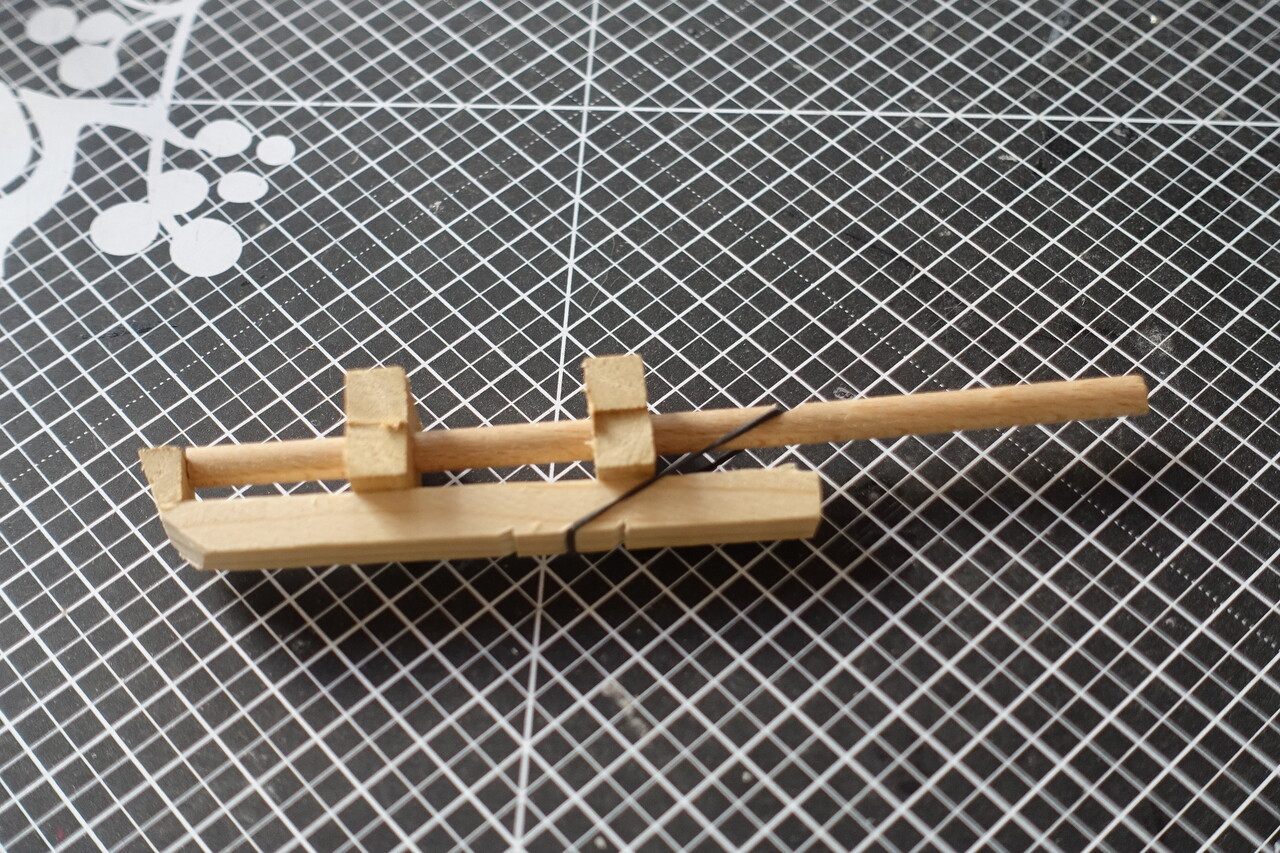
Doigt attrape pot
Cependant le poids du pot garni avec une plante est trop important pour les élastiques utilisés. Pour attraper seulement les plantes, les feuillages de celles-ci peuvent empêcher l’actionneur de se positionner correctement sur le pot. Sinon, nous aimions bien le principe :
Mots clés : 2024, Photo, Conception, Coupe
CARAR 2023 (INSA) - Homologuable !
2 avril 2023
Voici deux semaines qui ont été très chargées.
Au menu, intégrer les fonctions existantes pour créer un programme d’homologation et créer une ébauche de détection de l’adversaire.
Le programme d’homologation nous a réservé quelques surprises qu’il a bien fallu corriger, tandis que la détection de l’adversaire n’était qu’une ébauche avant notre départ pour la CARAR.
Après avoir pataugé bêtement pour faire fonctionner notre tirette, nous avons pu intégré la détection de l’adversaire sur place. Le robot était homologable.
Côté détection, une grosse mauvaise surprise : dans certaines conditions, lorsque le capteur n’avait pas d’obstacle à proximité, nous obtenions une valeur de l’ordre de 30 cm, pile dans la plage critique. C’est peut-être qu’un problème de code de notre côté, mais ça reste à confirmer !
Certes, il nous reste du travail, mais le robot commence à se montrer fiable sur un bon nombre d’actions et ça, c’est vraiment très important !
Match 3 - CARAR (720p - 12 Mo).
Nous avons également commencé à travailler sur notre panier définitif, mais il reste du travail :
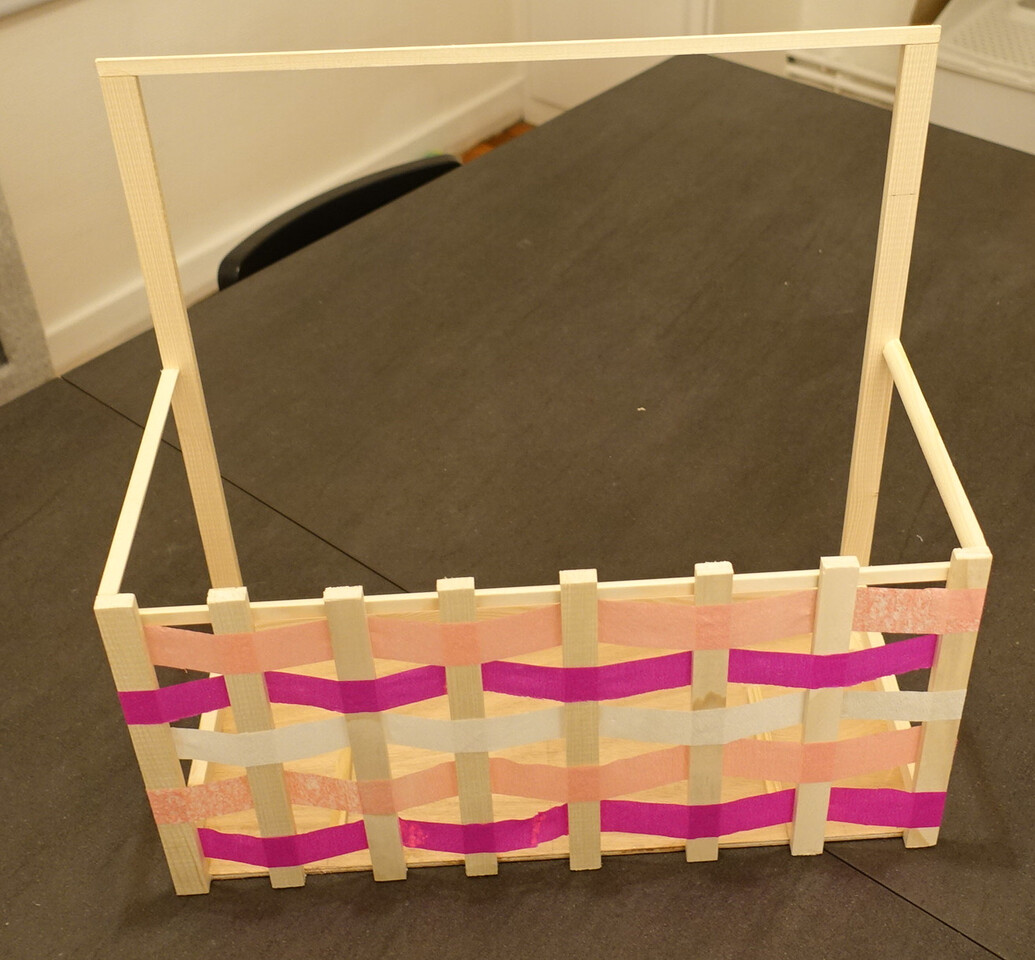
Futur panier
Avancement
Un bon nombre de nos tâches ont été terminées, et nous basculons maintenant sur la réalisation de la stratégie...
Du côté de nos tâches :
-
-
Propulseur - correction des perturbations électromagnétique: Corrigé-
Bouclier électromagnétique autour des moteurs (feuille de papier d’aluminium): fait mais pas très efficace... -
Changement de la fréquence de la commande : 50 Hz à 5 kHz: fait et efficace !
-
-
Rampe entre l’aspiration et le propulseur-
Certaines balles tombent, une rambarde à rajouter: fait !
-
-
-
Longer les bordures-
Translation en longeant: fait !
-
-
Transformer la base roulante en robot:-
Installer le mat balise: fait !
-
- Améliorer la détection de l’adversaire
- Tester la perturbation par un capteur en face : à faire
- Éliminer les obstacles hors du terrain
- Supervision
- Mesurer la tension de la batterie et détecter une batterie faible
- Être capable de récupérer des "logs" en fin de match
- Stratégie
- Intégrer la détection de l’adversaire dans la stratégie : fait, mais à améliorer
- Enchaîner sur la prise des cerises proches du panier
- Enchaîner sur la prise des cerises au milieu de la grande bordure.
Mots clés : Coupe, Vidéo, Robot holonome, 2023
Contacteurs et détection de l’adversaire
23 février 2023
Inscription à la Coupe de France
Cette année, nous participons à la coupe de France de Robotique dans la catégorie "Legends" nouvellement créée. Une des conditions est de fournir un projet scientifique et un plan de communication. Voici le nôtre.
{kind=link}
Aspiration des balles
Le dernier prototype nous avait donné satisfaction, voici la vidéo.
Aspiration des balles avec le prototype (1 Mo).
Voici quelques photos de la construction de la version finale. Nous l’avons bien montée une fois sur le robot mais démontée presque aussi tôt pour s’occuper des contacteurs.

Aspiration cerises : démontée

Aspiration cerises : vue de face
Une autre raison pour laquelle nous avons démonté le système, c’est que lors de nos essais la turbine était maintenue à la main et que nous l’avons bousillée. Attention, les pâles de turbines sont vraiment dangereuses pour les yeux !

Turbine HS
Nous avons reçu les nouvelles turbines, mais nous ne les avons pas encore installées.
Installation des contacteurs
Les contraintes de place sont assez fortes au niveau des contacteurs. Surtout que ceux-ci doivent être protégés car nous comptons sur eux pour longer des murs. Nous avons finalement un modèle qui nous satisfait. Voici le prototype :

Contacteur désassemblé

Contacteur assemblé

Surface en PTFE pour les frottements
L’intégration nous a quand même demandé un peu de temps. Mais les contacteurs sont maintenant câblés et raccordés à la carte électronique.

Contacteur "fin de course"

Contacteurs pour longer les murs
Détection de l’adversaire
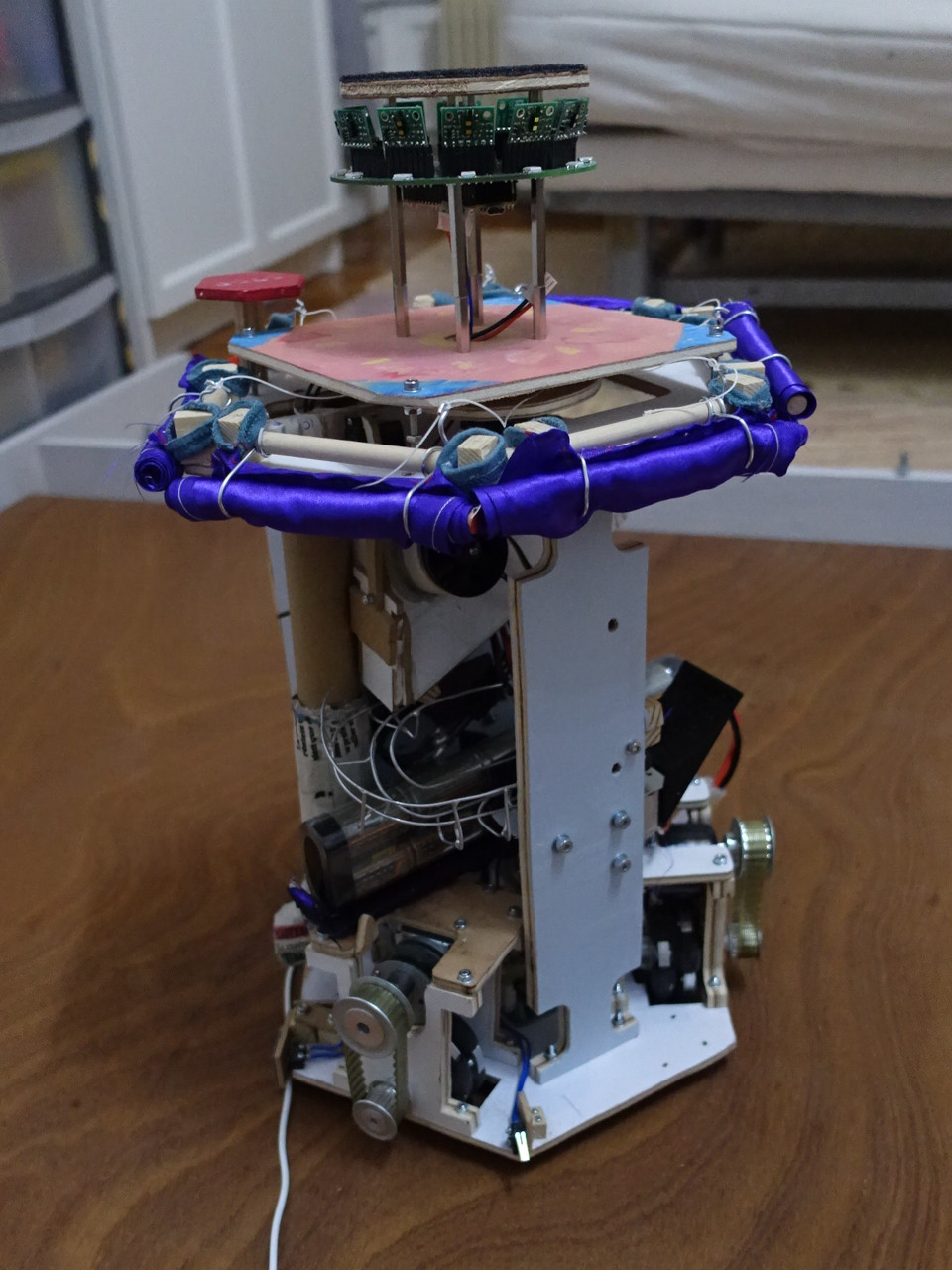
Nous avons fini la conception de nos cartes, commandé et reçu nos cartes de détection de l’adversaire.

Nous les avons aussi partiellement soudées. Nous avons commandé les mauvaises référence de LED, nous attendons la nouvelle commande. Nous n’avons pas encore soudé tous les capteurs. Nous attendons de valider un minimum le code avant de tous les souder.

Détection - dessus

Détection - dessous
Les quelques lignes de code montrent que la carte se comporte comme prévu, avec la possibilité de désactiver les capteurs un par un.
Déplacement
Nous arrivons enfin à finaliser un mouvement qui nous tenait à cœur : avancer droit en faisant tourner le robot sur lui-même.
C’est probablement l’un des mouvements le plus complexe que le robot aura à faire et donc un bon moyen de valider notre architecture.
Bref, la joie du robot holonome !
Avancement
Du côté de nos tâches :
- Reprendre les tests avec la turbine
- Aspiration : nous avons enfin un prototype concluant
- Soufflage : abandon, nous allons tenter de propulser les cerises avec des roues.
-
Placer des contacteurs sur le robot pour détecter les bordures: Fait ! - Longer les bordures
- Transformer la base roulante en robot :
- Installer le mat balise
- Intégrer la turbine : réalisation à 90%
- Améliorer la détection de l’adversaire
- Électronique : carte reçue et partiellement soudée et testée
- Programmation : sélection des capteurs opérationnelle
Mots clés : Conception, Coupe, Électronique, Mécanique, Vidéo, Photo, Robot holonome, 2023
Règlement 2023 et notre programme
16 septembre 2022
Le brouillon du règlement de la coupe est disponible, sur le site de la coupe de France de robotique. Cela fait donc une semaine que nous réfléchissons activement au règlement.
C’est un règlement à l’opposée de celui de l’an dernier, avec une table presque sans obstacle qui incite à avoir des robots qui se déplace bien, voire très bien sur le terrain !
Alors, en attendant la version finale du règlement - la FAQ peut vous indiquer dans quel sens évolue le règlement - nous ébauchons nos robots.
Cette année nous sommes très tentés d’avoir deux robots. Le premier sera basé sur notre architecture de 2014 et sera chargé de marquer les points avec les gâteaux. Le second robot sera bien différent du premier et s’occupera des cerises. Voici ce que nous avons en tête avec les principales étapes du projet.
Robot des gâteaux
Basé sur le robot historique, nous réutiliserons les roues, les moteurs, le gyroscope et notre magnifique carte électronique maison. Il embarquera les 10 cerises du départ, devra pousser et tirer les gâteaux dans les assiettes et leur déposer une cerise dessus. Voici notre programme (pas forcément dans l’ordre) :
- Programmation : gérer les accélérations et décélération au niveau des trajectoires
- Programmation : Arrêt de l’asservissement en cas d’erreur trop grande
- Mécanique : actionneur pour prendre une cerise du réservoir du robot et la déposer sur un gâteau
- Mécanique : refaire le châssis, diminuer le périmètre non-déployé
- Programmation - optionnel : Gérer la stratégie haut niveau avec le Raspberry Pi
Robot des cerises
Nous partons de zéro pour ce robot. Pour la localisation, nous tentons de rester sur l’architecture qui nous a si bien réussi : des codeurs sur les moteurs. Pour le reste, l’objectif est de changer un peu des technologies utilisées depuis 2014 sur nos robots. Ce sera donc un robot holonome, d’un diamètre modeste (nous visons 25cm). Le cœur de l’électronique sera un Raspberry Pi Pico et pour le pilotage des moteurs, nous hésitons entre des LMD18200 ou des modules de type Pololu. Sur ce robot, notre programme est très chargé :
- Mécanique : base roulante holonome
- Mécanique : intégration de l’électronique
- Mécanique : intégration de la batterie
- Électronique : prototypage sur plaque de test pour valider les capteurs/actionneurs
- Électronique : conception de la carte
- Programmation : lecture du gyroscope à partir du RPI Pico
- Programmation : lecture des capteurs de couleur à partir du RPI Pico
- Programmation : lecture des codeurs à partir du RPI Pico
- Programmation : portage du code des servomoteurs (ou utilisation des PWM ?)
- Programmation : portage des codes de déplacement sur RPI Pico (asservissement, construction des trajectoires, accélération et décélération, arrêt sur erreur trop grande)
- Divers : système de préhension et de dépose des cerises
- Divers : système d’évitement.
En gros
Un programme bien (trop ?) chargé. Alors nous essayons de ne pas trop traîner, nous avançons bien côté shopping. Nous espérons avoir fini de commander les composants nécessaire à la nouvelle roulante ce week-end. Ensuite, nous nous focaliserons sur le RPI Pico...
Mots clés : Conception, Coupe, Odométrie, Robot holonome, 2023
Administration du site