Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !
Dernières nouvelles
L’électronique des PAMI
28 février 2024
Les PAMI sont des petits robots autonomes qui entrent en jeu dans les 10 dernières secondes du match.
Voici la carte électronique que nous comptons utiliser si nous avons le temps de réaliser ces PAMI.

Les fonctionnalités principales sont :
- Microcontrôleur Raspberry Pi Pico
- Connecteur pour l’arrêt d’urgence
- 2 prises moteurs (pilotés par un L293D)
- 2 prises codeurs
- 1 prise Gyroscope (L3GD20H)
- 1 prise I2C pour du TOF
- 1 prise "choix couleur"
- 1 prise tirette
- Surveillance tension batterie
- 1 LED
- 3 Dip Switch
Dimensions : 50 mm x 90 mm
Tous nos fichiers sont ici.
Mots clés : 2024, Électronique, Mini robot (PAMI)
Contacteurs et détection de l’adversaire
23 février 2023
Inscription à la Coupe de France
Cette année, nous participons à la coupe de France de Robotique dans la catégorie "Legends" nouvellement créée. Une des conditions est de fournir un projet scientifique et un plan de communication. Voici le nôtre.
{kind=link}
Aspiration des balles
Le dernier prototype nous avait donné satisfaction, voici la vidéo.
Aspiration des balles avec le prototype (1 Mo).
Voici quelques photos de la construction de la version finale. Nous l’avons bien montée une fois sur le robot mais démontée presque aussi tôt pour s’occuper des contacteurs.

Aspiration cerises : démontée

Aspiration cerises : vue de face
Une autre raison pour laquelle nous avons démonté le système, c’est que lors de nos essais la turbine était maintenue à la main et que nous l’avons bousillée. Attention, les pâles de turbines sont vraiment dangereuses pour les yeux !

Turbine HS
Nous avons reçu les nouvelles turbines, mais nous ne les avons pas encore installées.
Installation des contacteurs
Les contraintes de place sont assez fortes au niveau des contacteurs. Surtout que ceux-ci doivent être protégés car nous comptons sur eux pour longer des murs. Nous avons finalement un modèle qui nous satisfait. Voici le prototype :

Contacteur désassemblé

Contacteur assemblé

Surface en PTFE pour les frottements
L’intégration nous a quand même demandé un peu de temps. Mais les contacteurs sont maintenant câblés et raccordés à la carte électronique.

Contacteur "fin de course"

Contacteurs pour longer les murs
Détection de l’adversaire
Nous avons fini la conception de nos cartes, commandé et reçu nos cartes de détection de l’adversaire.

Nous les avons aussi partiellement soudées. Nous avons commandé les mauvaises référence de LED, nous attendons la nouvelle commande. Nous n’avons pas encore soudé tous les capteurs. Nous attendons de valider un minimum le code avant de tous les souder.

Détection - dessus

Détection - dessous
Les quelques lignes de code montrent que la carte se comporte comme prévu, avec la possibilité de désactiver les capteurs un par un.
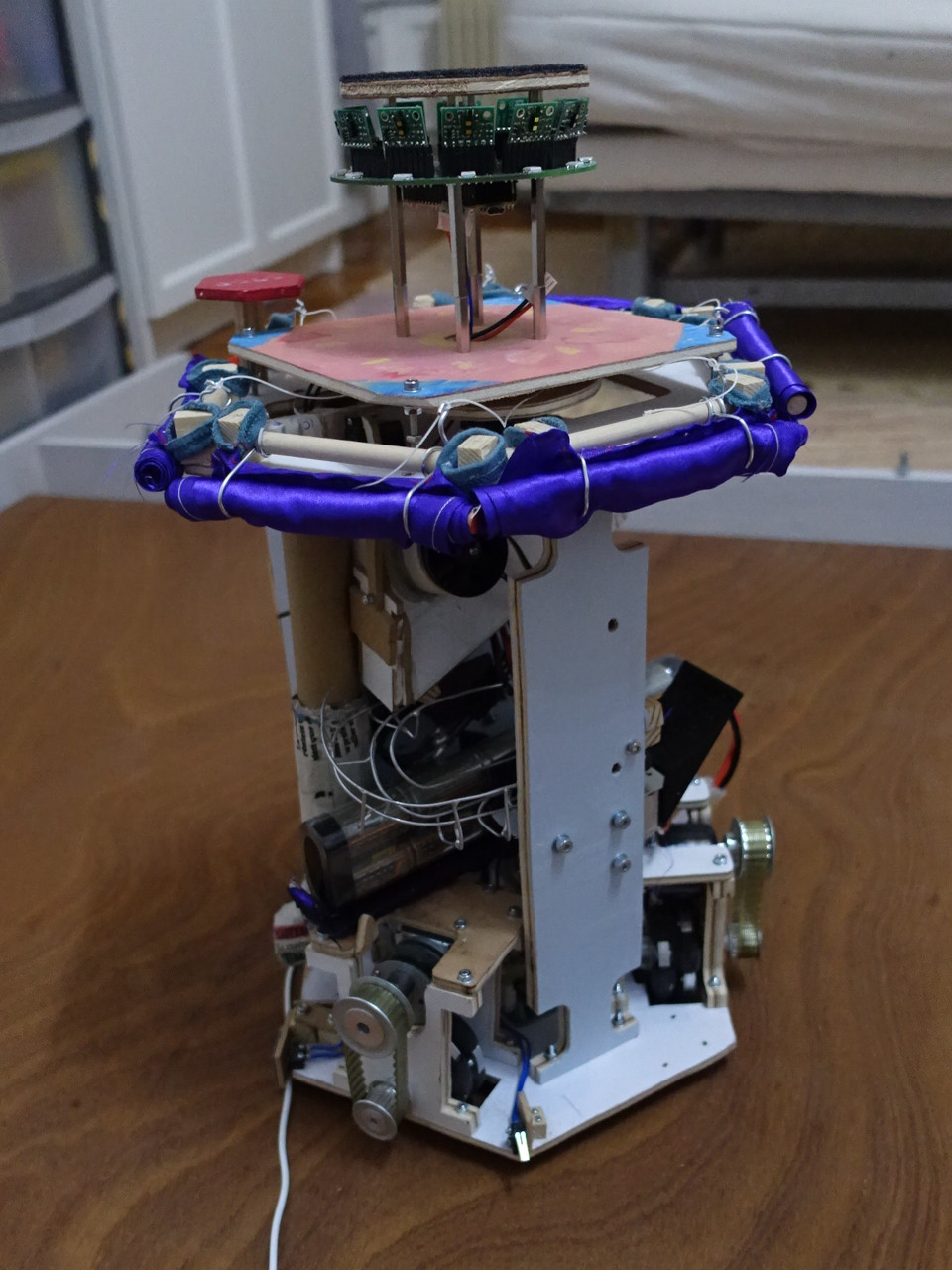
Déplacement
Nous arrivons enfin à finaliser un mouvement qui nous tenait à cœur : avancer droit en faisant tourner le robot sur lui-même.
C’est probablement l’un des mouvements le plus complexe que le robot aura à faire et donc un bon moyen de valider notre architecture.
Bref, la joie du robot holonome !
Avancement
Du côté de nos tâches :
- Reprendre les tests avec la turbine
- Aspiration : nous avons enfin un prototype concluant
- Soufflage : abandon, nous allons tenter de propulser les cerises avec des roues.
-
Placer des contacteurs sur le robot pour détecter les bordures: Fait ! - Longer les bordures
- Transformer la base roulante en robot :
- Installer le mat balise
- Intégrer la turbine : réalisation à 90%
- Améliorer la détection de l’adversaire
- Électronique : carte reçue et partiellement soudée et testée
- Programmation : sélection des capteurs opérationnelle
Mots clés : Conception, Coupe, Électronique, Mécanique, Vidéo, Photo, Robot holonome, 2023
Carte Holonome 2023 - Enfin soudée !
2 décembre 2022
Nous vous avions présenté la carte nue, la documentation interactive de la carte mais pas la carte soudée ! Il lui manque bien un ou deux connecteur, mais la voici :

Carte Holonome 2023 soudée
Mots clés : Électronique, Photo, Robot holonome, 2023, Raspberry Pi Pico
Carte Holonome 2023 - La doc !
13 novembre 2022
Après plusieurs essais, nous avons enfin la documentation de notre carte.
La bibliothèque Pinion, que nous utilisons, ne se porte pas très bien. Les différentes briques logicielles semblent avoir évolué séparément et la dernière version Pinion ne semble pas compatible avec les dernières versions de ses dépendances pcbdraw et pcbnewTransition.
À l’heure actuelle, la dernière version livrée est la 0.2.0. Pour l’utiliser, il faut installer manuellement pcbdraw en version 0.8.0 et pcbnewTransition en version 0.1.0 :
pip3 install pinion==0.2.0
pip3 install pcbdraw==0.8.0
pip3 install pcbnewTransition==0.1.0Pour construire cette visualisation de la carte nous avons suivi notre article sauf que nous avons modifié cette ligne dans le fichier template.py :
# p.insert(0, "name", f"{footprint.GetReference()}.{pad.GetName()}")
p.insert(0, "name", f"{pad.GetNetname()}")
Ainsi, la configuration générée lie les broches du même signal entre elles.
Mots clés : Conception, Électronique
Journal - 16 octobre 2022
16 octobre 2022
Un mois sans donner de nouvelles ! Comment avons-nous pu faire ça ? Et maintenant, nous avons tellement de choses à raconter, et pas trop de temps... Ce sera donc bref.
Le gyroscope et le Rpi Pico
Dans l’idée de se faire la main sur le Raspberry Pi Pico, qui servira de contrôleur sur notre prochaine carte électronique, nous testons alors le gyroscope L3GD20H. Nous observons des phénomènes un peu bizarres. Il nous faudra du temps pour comprendre que sur les 3 axes du gyroscope, celui que nous comptions utiliser (l’axe Z) est le pire des trois.
Nous mesurions une dérive régulière de 8°/minutes, en statique. Une analyse plus poussée montrera que cet axe met plus de temps à se stabiliser que les autres... Notre calibration se servait alors de ces valeurs fausses, créant cette dérive.

Gyroscope L3GD20H - traitement non-optimal
Les autres axes (X et Y) ne sont pas parfaits mais exploitables.
Déçus, nous achetons un second ADXRS453, pour voir si nous obtenons de meilleurs résultats. Les essais sont en cours.
Globalement, l’environnement du Rpi Pico manque un peu de légèreté, cmake est affreux, l’intégration à VS Code bien mais pas géniale. La puce reste puissante par rapport à nos anciens microcontrôleurs et la liaison USB est extrêmement pratique. L’intégration facile sur une plaque de test est aussi un très gros plus !
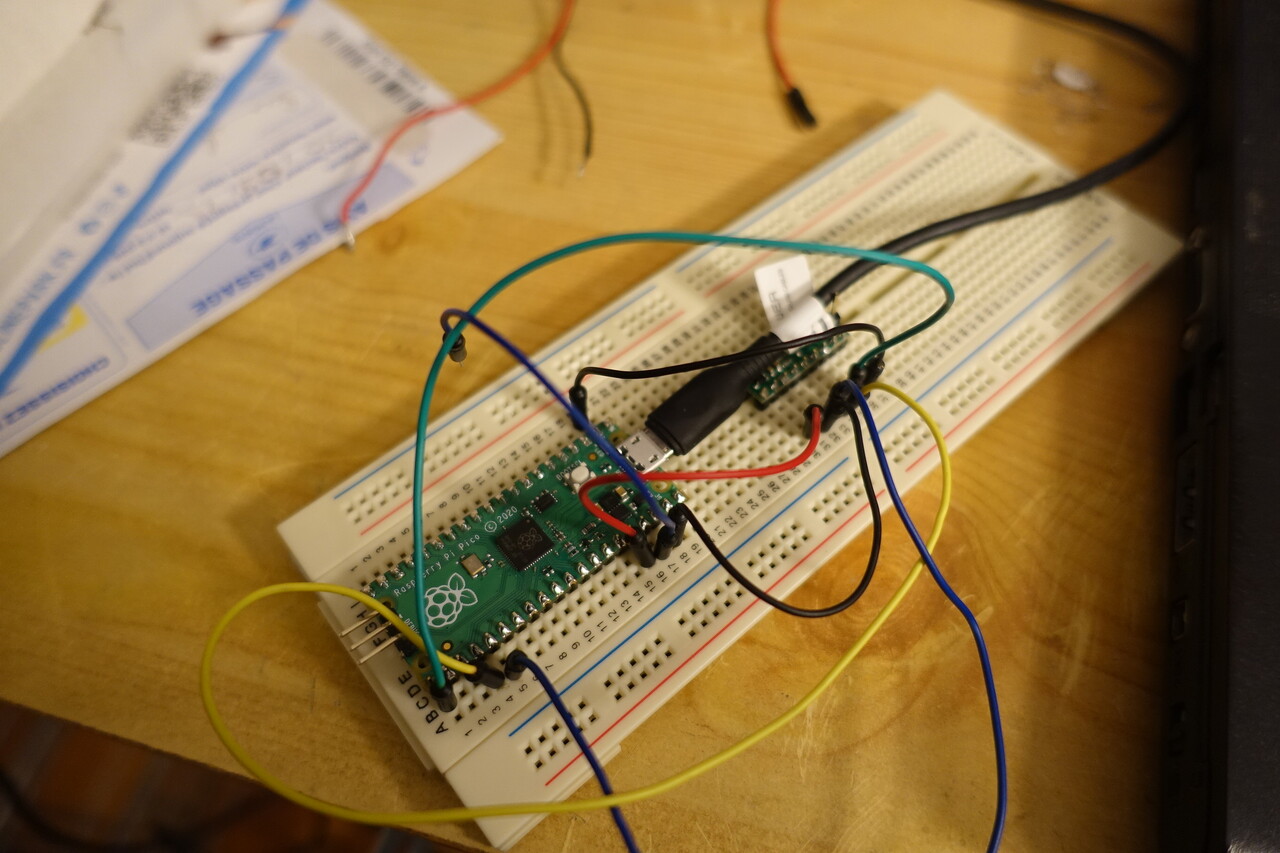
Rpi Pico et son gyroscope
Un petit mot sur la documentation. Si vous souhaitez bien maîtriser la bête vous aurez besoin des documents suivants :
- Le guide de démarrage rapide ;
- La fiche technique du Rapsberry Pi Pico (la carte) ;
- La documentation du SDK en C/C++ ou son pendant en python ;
- La fiche technique du RP2040 parce que le SDK en C/C++ ne couvre pas forcément tout ;
- La FAQ ne m’a pas été utile, mais ne pas la lire est certainement une erreur.
La carte électronique
Début octobre, nous nous sommes concentrés sur la carte électronique. Le schéma puis le routage dans la foulée. L’architecture se base sur 2 Rpi Pico reliés en I2C. Un qui gère le déplacement (moteurs, codeurs, gyroscope) qui sera le maître et gérera aussi la stratégie. L’autre analysera les capteurs et mettra les informations à disposition du maître. Comme nous avons eu peur que ça fasse juste en termes d’entrées-sorties, nous avons rajouté une extension d’entrées/sorties I2C (TCA9535).
Nous avons reçu la carte et les composants, y’a plus qu’à souder...
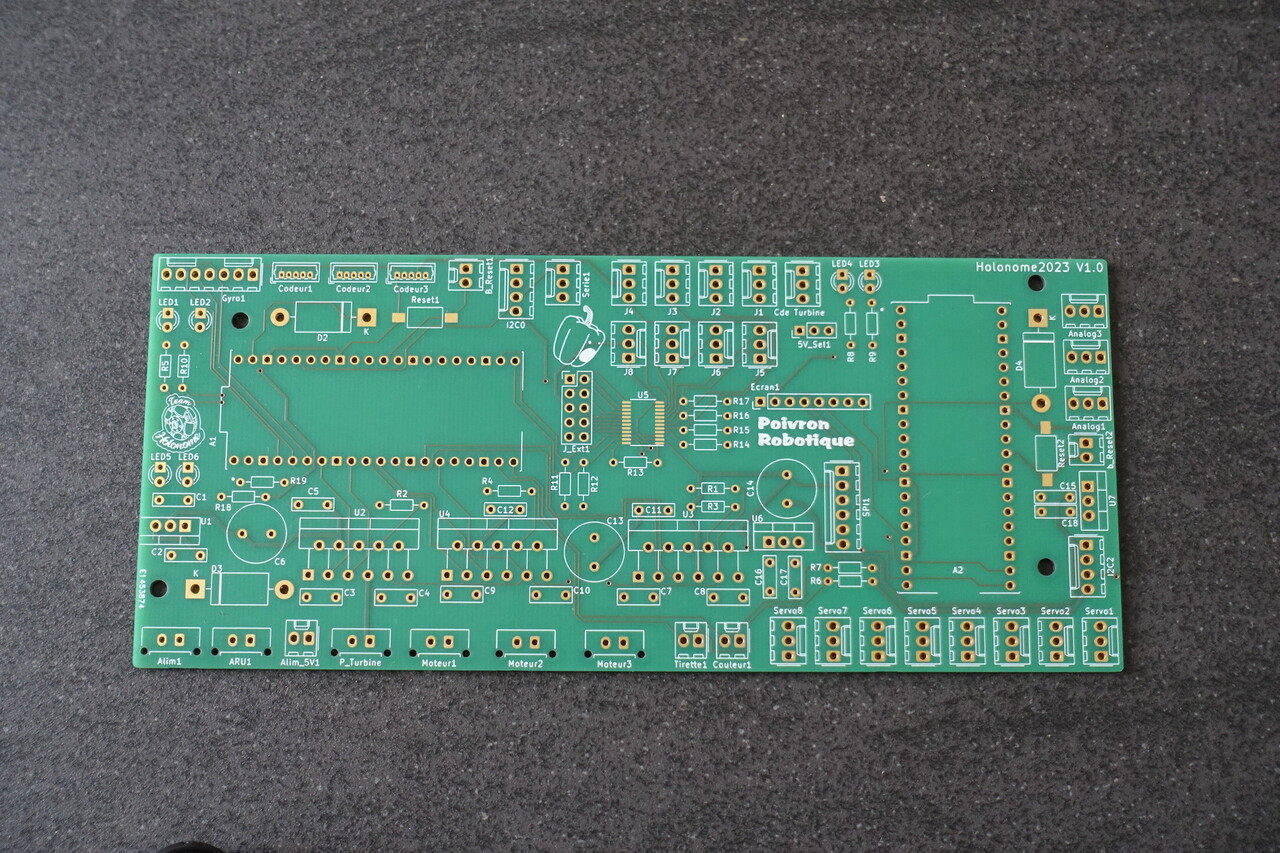
Carte Holonome 2023 nue
On admire la sérigraphie :

Sérigraphie de la carte 2023
Une fois soudée, la carte pourrait ressembler à ceci :

Carte Holonome 2023 - modélisation
Côté mécanique
La base roulante progresse, grâce à notre scie à chantourner. Nous manquons de vis, rondelles et écrous pour l’assembler proprement...
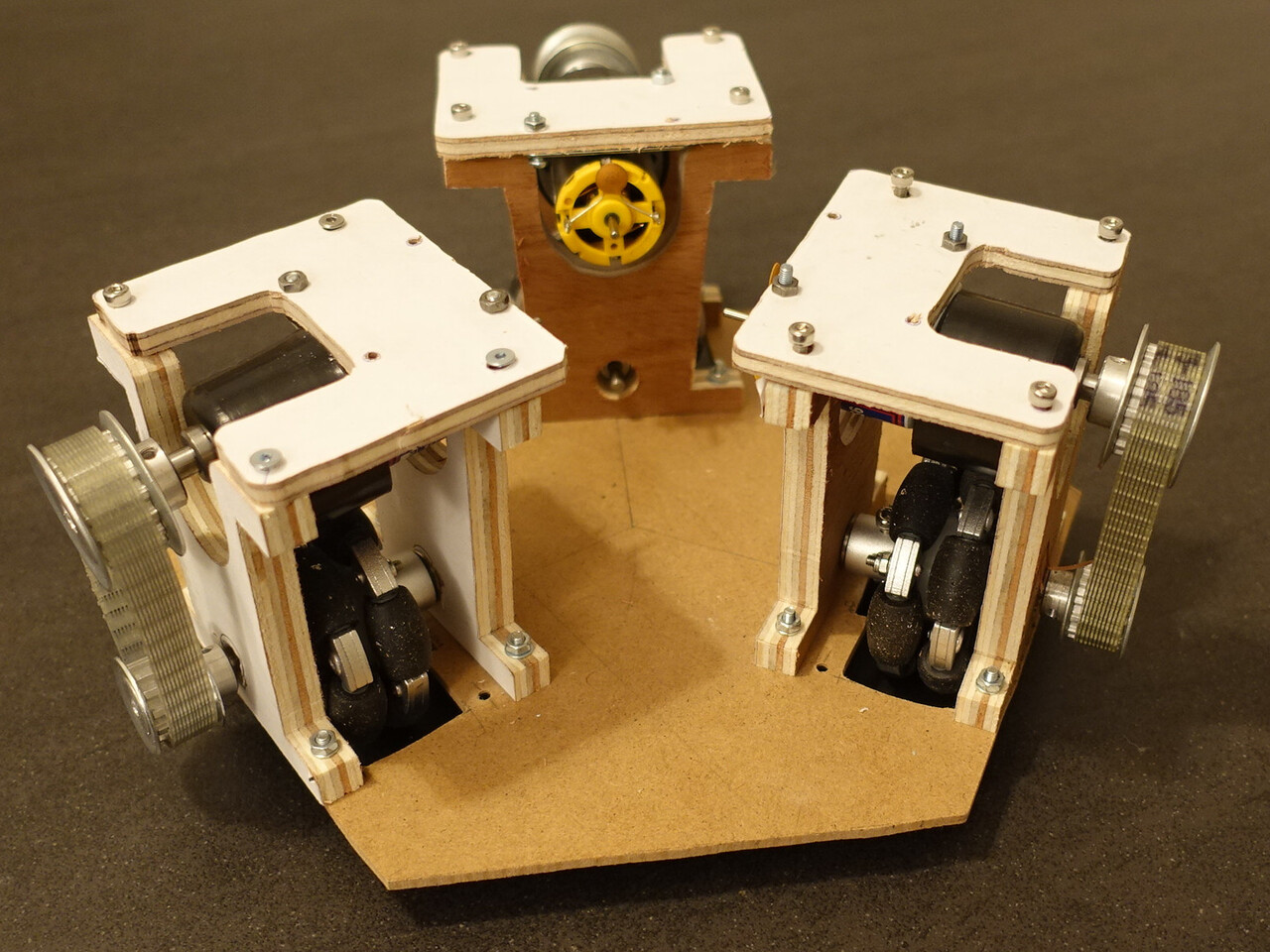
Base roulante holonome
Dommage, non ?

Base roulante holonome
Mots clés : Électronique, Robot holonome, 2023, Raspberry Pi Pico
page précédente 1 2 3 4 5 page suivante
Administration du site