Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !

Dernières nouvelles
Un capteur, le VL53L8CX et un actionneur, le bras pour les pots
26 octobre 2023
Le règlement définitif de la Coupe de France de robotique est enfin publié et nous avons donc avancé dans la conception générale de notre robot.
Tout d’abord, nous avons abandonné complètement l’idée de notre premier actionneur, cette espèce de doigt. En effet, la présence des feuilles faisait qu’il repoussait les plantes au lieu de les saisir et pour les pots, la force nécessaire pour les tenir lorsqu’ils contiennent une plante nous paraissait trop grande.
Puis nous avons décidé que nous nous focaliserons sur la partie principale du règlement, attraper les plantes pour les mettre en pot et les stocker dans la jardinière. Pour cela, nous identifions trois parties principales du robot :
- une pince pour attraper les plantes ;
- un bras pour manipuler les pots ;
- une zone de stockage des pots.
Le bras des pots
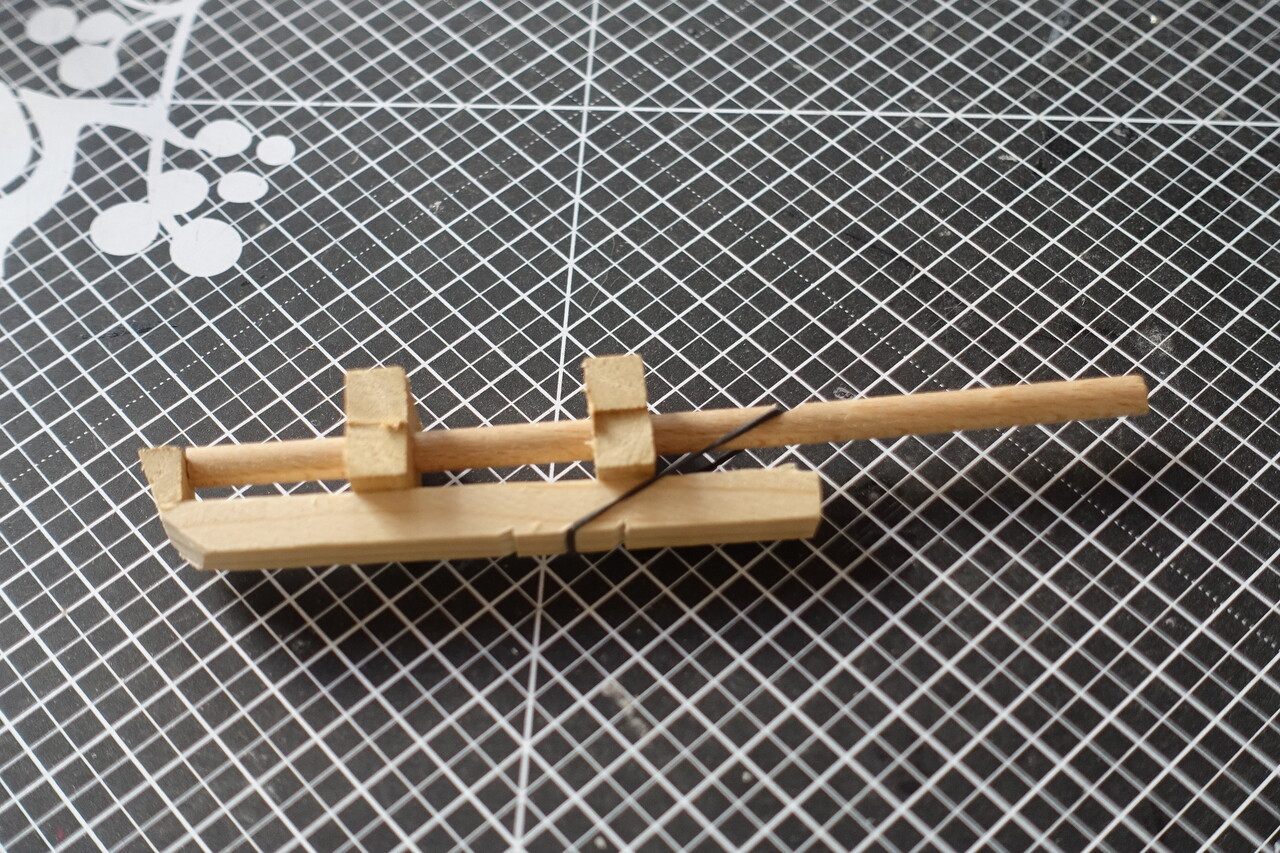
Le bras pour manipuler les pots va avoir un gros impact sur la conception du robot. Nous avons rapidement réalisé un prototype en faisant un pari risqué : nous parions que les pots seront ceux d’Ikea lors des compétitions et nous les ersatz en impression 3D.
La détection des plantes
Cette année, l’élément de jeu principal - les plantes - ne se trouve pas à une position fixe sur la table de jeu. Nous décidons d’utiliser un système de détection pour les trouver.
Notre choix se porte sur le VL53L8CX après des essais plus ou moins concluants avec le VL53L1X. Le VL53L1X semblait prometteur dans le sens où nous étions en bonne voie d’arriver à détecter un pot. Mais le VL53L8CX présente de nombreux avantages, notamment une utilisation plus simple pour ce genre de cas et une bien meilleure précision.
Nous fournissons un code "rustique", basé sur l’API de STMicroelectronics (STM), pour le Raspberry Pi Pico avec un bout de code pour visualiser les données sur le PC avec Processing. L’ensemble est sur notre Gitea.
Le montage se base sur les cartes SATEL de STM.
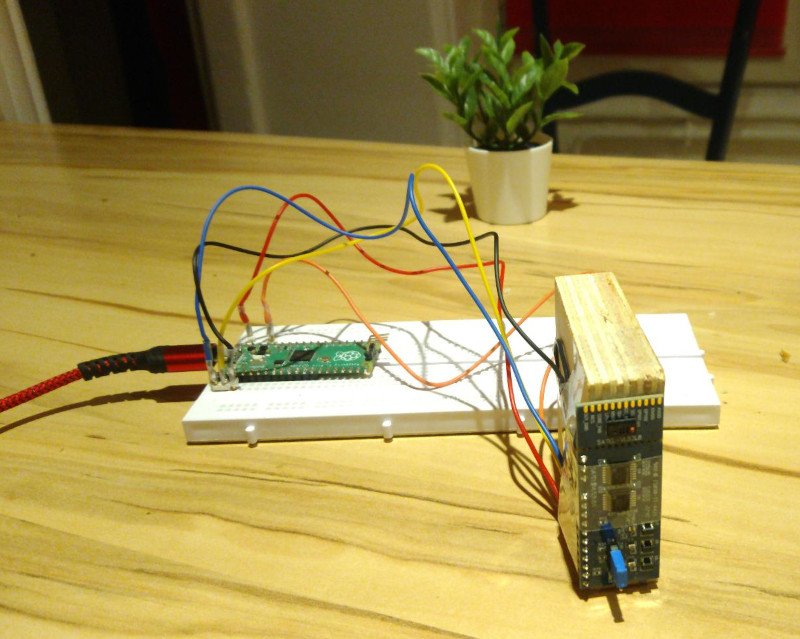
Montage avec le Raspberry Pi Pico et la carte SATEL-VL53L8CX
Voici une vidéo des données visualisées lorsque le capteur voit une plante passer devant puis s’en rapproche. Chaque pixel contient une information de distance, de 2 cm à 4 m, avec une précision de l’ordre du millimètre. Bleu signifie que l’objet est loin (65 cm dans la vidéo), rouge que l’objet est très proche.
Bref, nous sommes très contents de ce capteur !
Mots clés : 2024, Vidéo, Programmation, Capteur, Mécanique
La rentrée 2023 - club robotique et plantes
1er octobre 2023
Que s’est-il passé lors de cette rentrée 2023 ? Comment avons nous pu rester silencieux si longtemps après la publication du règlement de la coupe de France de robotique ? Tous ces mystères vont vous être révélés ! Mais avant cela, un peu de contexte.
Poivron Robotique est, depuis de longues années, une équipe familiale. Nos deux dernières participations nous ont montré que nous savions réaliser des robots, au moins pour notre compétition fétiche. Sûrs de nos acquis, nous tentons de grossir et de transmettre.
Club robotique de Riom
C’est pourquoi nous avons fondé le club robotique de Riom. La rentrée fut l’occasion de remettre nos deux robots (Capsicum et Hexa) en marche et de tenir un stand au forum des associations de la ville. Bien qu’ayant déjà été (un peu) engagés dans des associations, le démarrage ne fut pas de tout repos, entre la crainte de n’avoir personne, d’avoir trop de membres, de ne pas avoir de local, de ne pas avoir assez de budget... Bref, après avoir dépensé pas mal d’énergie - et peut-être avec un peu de chance - nous trouvons notre public et la mairie nous met à disposition une salle sur un créneau horaire confortable.
Nous partagerons prochainement le lien vers le site de l’association, mais pour l’instant, il faut le créer !
Les plantes
Le règlement de la Coupe de France de Robotique 2024 fut présenté le 9 septembre 2023, sous forme de brouillon. Les points des actions ne sont pas définis et certains détails pourraient changer. Mais en gros, il s’agit d’attraper des plantes, de les mettre dans des pots pour mettre l’ensemble soit dans une jardinière de l’autre côté de la bordure, soit dans une zone de dépose.

Plante et pot
Ce règlement présente deux défis :
- les plantes ne sont pas à des positions fixes, les saisir va demander une bonne détection ou un peu d’astuce ;
- la mise en pot ou la dépose dans les jardinières nécessite un actionneur mobile sur 2 axes. Bref, une mécanique un peu travaillée.
Mais les éléments de jeux légers et nombreux devraient nous inciter à réaliser de beaux mécanismes.
Nous cherchons les premiers mécanisme pour manipuler ces éléments de jeux, mais nous n’avons rien trouvé de satisfaisant pour l’instant. Notre première tentative d’actionneur se présente ainsi :
Doigt attrape pot
Cependant le poids du pot garni avec une plante est trop important pour les élastiques utilisés. Pour attraper seulement les plantes, les feuillages de celles-ci peuvent empêcher l’actionneur de se positionner correctement sur le pot. Sinon, nous aimions bien le principe :
Mots clés : 2024, Photo, Conception, Coupe
Présentation des robots
15 août 2023
Chers lecteurs,
Ce n’est pas un robot, mais deux que nous vous proposons de découvrir. Nous avons enfin fini la rédaction de la présentation de nos robots de 2022 et de 2023. Vous pouvez les découvrir ici :
Bonne lecture !
Coupe de France 2023 - Match 5 & le bilan
1er juillet 2023
Les choses sérieuses peuvent enfin commencer. Ou presque...
Avant de laisser le robot parcourir le terrain à sa guise, nous tenons à être sûr qu’il rentre dans un plat à la fin du match. Nous sommes en milieu d’après-midi et malgré un algorithme simple, qui cherche à atteindre chaque zone dans un certain ordre, il nous faudra la fin de l’après-midi pour mettre au point la fonction.
Elle ne nous servira pas en match, mais se déclenchera plusieurs fois lors des essais. Nous ne l’avons jamais prise en défaut.
Après le dîner, nous fixons un bras sur le robot pour pousser des gâteaux puis nous nous attaquons au code. Rien de bien compliqué, nous devons juste nous orienter correctement le robot au début de sa trajectoire. Avec la fatigue, il nous faudra 4 heures pour réaliser qu’une fonction est appelée deux fois, faussant toute la gestion de la trajectoire. Nous renonçons alors à pousser le deuxième lot de gâteaux et nous nous contentons que d’une paire de gâteau et d’un support de cerises supplémentaire.
Malgré un comptage des points imparfait dans le panier, ce sera notre plus beau match :
– 26 cerises dans le panier
– 6 tranches de gâteaux dans l’assiette
– déguisement + retour sur zone + estimation du score pas trop mauvaise
Match 5 (480p - 14 Mo | 720p - 30 Mo).
Nous marquons 78 et finissons 8e au classement général, 2e dans la catégorie "Legends".
Nous nous qualifions pour les demi-finales "Legends".
Demi-finale - Contre Mécapitronic
En très bref, le gyroscope se met en erreur au tout début du match. Le robot le détecte et s’arrête là.
On rentre chez nous en terminant sur un forfait...
Le bilan
Notre premier sentiment, c’est de l’insatisfaction. Notre robot aurait pu faire bien mieux. Mais nous avons passé un super moment, retrouvé cette ambiance qui nous ait chère, avons lutté jusqu’au bout et malgré une déception finale, avons réalisé une bonne performance.
Notre classement nous parait un peu trop bon par rapport à ce que le robot a fait sur la table, mais c’est un autre débat.
Nous marquons 302 points sur les 5 matchs. D’un point de vue fiabilité, sur les 5 matchs, voici notre analyse comparant la stratégie prévue et les points marqués :
| Actions | Points théoriques | Points réalisés | Fiabilité |
|---|---|---|---|
| Cerises | 95 points | 85 points | 89% |
| Déguisement | 25 points | 25 points | 100% |
| Panier présent | 25 points | 25 points | 100% |
| Comptage Panier | 25 points | 10 points | 40% |
| Comptage des points | 100 points | 86 points | 86% |
| Retour dans la zone | 75 points | 60 points | 80% |
| Gâteaux | 6 points | 6 points | 100% |
| Non Forfait | 5 points | 5 points | 100% |
| Total | 356 points | 302 points | 85% |
Donc globalement une stratégie peu ambitieuse mais relativement bien exécutée.
Coupe de France 2023 - Match 4
1er juillet 2023
Nous continuons à chercher la cause des perturbations de notre gyroscope. La documentation indique que l’erreur que nous obtenons peut provenir d’un souci de la PLL ou des fonctions d’auto-tests qui ne sont plus bonnes. L’autotest lit un signal du gyroscope à 500Hz. 500 Hz... Et nous avons ces énormes enceintes à 2 pas de la table de test. Nous demandons à Eirbot de monter le son et observons que le robot reproduit le défaut plus fréquemment.
En parallèle, une équipe nous conseille sur le blindage, nous conseillant de blinder les fils à la sortie du câble. Ce que nous faisons. Elle nous conseille de relier ce nouveau blindage au pôle négatif de la batterie, nous explique comment reprendre le blindage du câble pour qu’il soit plus efficace. Nous suivons tous ces conseils.
Alors qu’avant ces modifications nous reproduisions nos soucis 3 fois sur 5, nous réalisons une série de 10 essais sans souci !
Nous sommes piles au début de la 4e série et nous ne voulons pas prendre de risque en prolongeant notre stratégie. Nous gardons notre stratégie toute simple.
Nos cerises se bloquent dans le panier, nous faisant perdre 5 points du panier et par conséquent 5 points à l’estimation du score. Nous marquons 57 points et nous hissons quand même à la 9e place.
Match 4 (480p - 8 Mo | 720p - 16 Mo).
La suite : Coupe de France 2023 - Match 5 & le bilan
Administration du site