Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !
Dernières nouvelles
2 semaines avant la coupe
23 avril 2024
Voilà un mois que nous n’avons rien publié et nous voilà à 2 semaines de la compétition... Mais qu’avons-nous fait ?
Le VL53L8X
Rappelons que ce capteur mesure 64 distances à chaque acquisition, répartis sur une grille de 8x8.
Ce capteur nous a bien occupé et les résultats sont au niveau des attentes. Le robot détecte les bordures et se recale. Il trouve même sa position de départ tout seul !
L’identification de la bordure se fait en prenant 8 points horizontaux. Nous utilisons une régression linéaire et les caractéristiques de la droite trouvée nous ont vite donné satisfaction. Ce qui nous a embêté, c’est le rejet des valeurs perturbées par la présence d’un pot devant la bordure. Pour cela, nous utilisions un critère, nommé qualité de prédiction par Wikipédia. Ce critère, pour estimer que les points forment une droite, est proche de 1 si les points forment une droite, proche de 0 dans le cas contraire. Or dans notre cas, face à une bordure, le critère variait en fonction de l’angle du robot avec la bordure. Ci-dessous, nos données expérimentales :

Critère régression linéraire
L’explication détaillée mériterait un article, mais en gros, le critère que nous utilisions évaluait le rapport entre la variation en Y des points théoriques par rapport à la variation en Y des points réels. Quand l’angle entre la bordure et le robot est proche de 0, la variation des points théoriques devient très faible alors que la variation des points réels reste constant à cause des erreurs de mesures.
Nous avons bidouillé notre propre critère en se basant sur les écarts en les Y réels et les Y théoriques.
Le capteur permet aussi au robot de trouver les plantes, avec une logique simple, ciblant le point le plus proche.
Attraper les pots
Le robot a attrapé ses premiers pots. Un moment touchant pour nous, car le spectacle semble à la hauteur de nos espérances.
PAMI
Nous vous avions présenté la conception de la carte électronique des PAMIs, voici la conception mécanique !

Modélisation PAMI 2024
Et le premier PAMI partiellement monté :

PAMI 2024 - montage en cours
La suite
C’est maintenant une course contre la montre :
- Aurons nous le temps (et les pièces) pour fabriquer 6 PAMI
- Le gros du code du robot semble être en place, mais il faut
- intégrer la tirette ;
- intégrer la gestion de la couleur de démarrage ;
- s’assurer que la détection de l’adversaire fonctionne ;
- réaliser un semblant de stratégie
Mots clés : Programmation, Vidéo, 2024, Capteur, Mini robot (PAMI)
Un capteur, le VL53L8CX et un actionneur, le bras pour les pots
26 octobre 2023
Le règlement définitif de la Coupe de France de robotique est enfin publié et nous avons donc avancé dans la conception générale de notre robot.
Tout d’abord, nous avons abandonné complètement l’idée de notre premier actionneur, cette espèce de doigt. En effet, la présence des feuilles faisait qu’il repoussait les plantes au lieu de les saisir et pour les pots, la force nécessaire pour les tenir lorsqu’ils contiennent une plante nous paraissait trop grande.
Puis nous avons décidé que nous nous focaliserons sur la partie principale du règlement, attraper les plantes pour les mettre en pot et les stocker dans la jardinière. Pour cela, nous identifions trois parties principales du robot :
- une pince pour attraper les plantes ;
- un bras pour manipuler les pots ;
- une zone de stockage des pots.
Le bras des pots
Le bras pour manipuler les pots va avoir un gros impact sur la conception du robot. Nous avons rapidement réalisé un prototype en faisant un pari risqué : nous parions que les pots seront ceux d’Ikea lors des compétitions et nous les ersatz en impression 3D.
La détection des plantes
Cette année, l’élément de jeu principal - les plantes - ne se trouve pas à une position fixe sur la table de jeu. Nous décidons d’utiliser un système de détection pour les trouver.
Notre choix se porte sur le VL53L8CX après des essais plus ou moins concluants avec le VL53L1X. Le VL53L1X semblait prometteur dans le sens où nous étions en bonne voie d’arriver à détecter un pot. Mais le VL53L8CX présente de nombreux avantages, notamment une utilisation plus simple pour ce genre de cas et une bien meilleure précision.
Nous fournissons un code "rustique", basé sur l’API de STMicroelectronics (STM), pour le Raspberry Pi Pico avec un bout de code pour visualiser les données sur le PC avec Processing. L’ensemble est sur notre Gitea.
Le montage se base sur les cartes SATEL de STM.
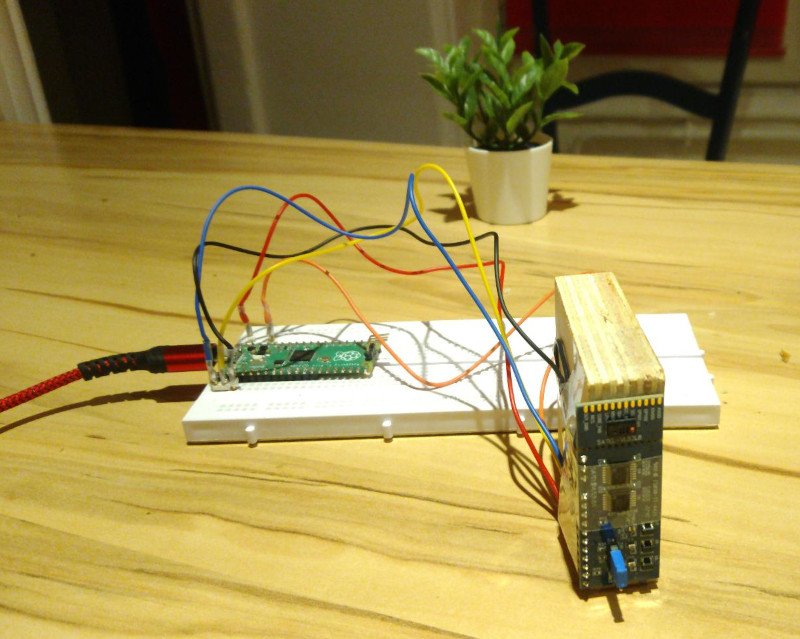
Montage avec le Raspberry Pi Pico et la carte SATEL-VL53L8CX
Voici une vidéo des données visualisées lorsque le capteur voit une plante passer devant puis s’en rapproche. Chaque pixel contient une information de distance, de 2 cm à 4 m, avec une précision de l’ordre du millimètre. Bleu signifie que l’objet est loin (65 cm dans la vidéo), rouge que l’objet est très proche.
Bref, nous sommes très contents de ce capteur !
Mots clés : Mécanique, Programmation, Vidéo, 2024, Capteur
Administration du site