Présentation de l’équipe
3 septembre 2012
Article mis à jour en juin 2025
Poivron est une petite équipe qui participe à la coupe de robotique depuis l’édition de 2010. Constituée de deux membres réguliers, nous accueillons ou exploitons parfois d’autres personnes en fonction des années. Nous sommes indépendants de toute structure, nous ne disposons pas de local et notre outillage était très limité, surtout pour nos premiers robots. Si au cours des années, nous nous sommes équipés, nous tenons à conserver cet aspect rustique où nous ne mobilisons que les moyens nécessaires et pas plus.
Notre philosophie consiste à limiter les technologies déployées sur les robots mais à en tirer le meilleur. Et pour cela, le secret est de passer du temps à maîtriser chaque brique qui compose le robot.
Écrire des articles sur nos réalisations est une des clés de Poivron. La préparation des articles nous oblige à regarder nos réalisations avec un œil critique et à finaliser ce qui restait à l’état de brouillon.
Vous avez ci-dessous les évolutions des robots au cours des années, en détaillant les technologies acquises ou abandonnées...
Première génération de robot
Notre première génération de robots est marquée par une construction avec des baguettes de bois, une l’électronique conçue maison, principalement à base de portes logiques et de microcontrôleurs PIC.
Poivron 2010
Premier robot de l’équipe, il nous donne confiance dans :
- L’utilisation d’un PIC18F2550
- L’utilisation d’un seul moteur à courant continu pour le déplacement, orienté par un moteur pas à pas.
- L’utilisation d’une CMUCAM (vision) et d’un algorithme maison et sommaire de détection (couleur).
- Détection des adversaires par ultrason

Poivron

Ravage 2011
Deuxième robot, dans la lignée du précédent :
- Nous gardon la CMUCAM et améliorons un peu notre algorithme.
- Nous rajoutons un gyroscope (Wii motion plus) pour aider le robot à se repérer sur le terrain
- Nous multiplions les cartes électroniques, toutes basées sur des PIC 18f2550 et découvrons la communication I2C
- Nous remplaçons le servomoteur qui faisait office de direction par un moteur pas-à-pas.

RAVAGE

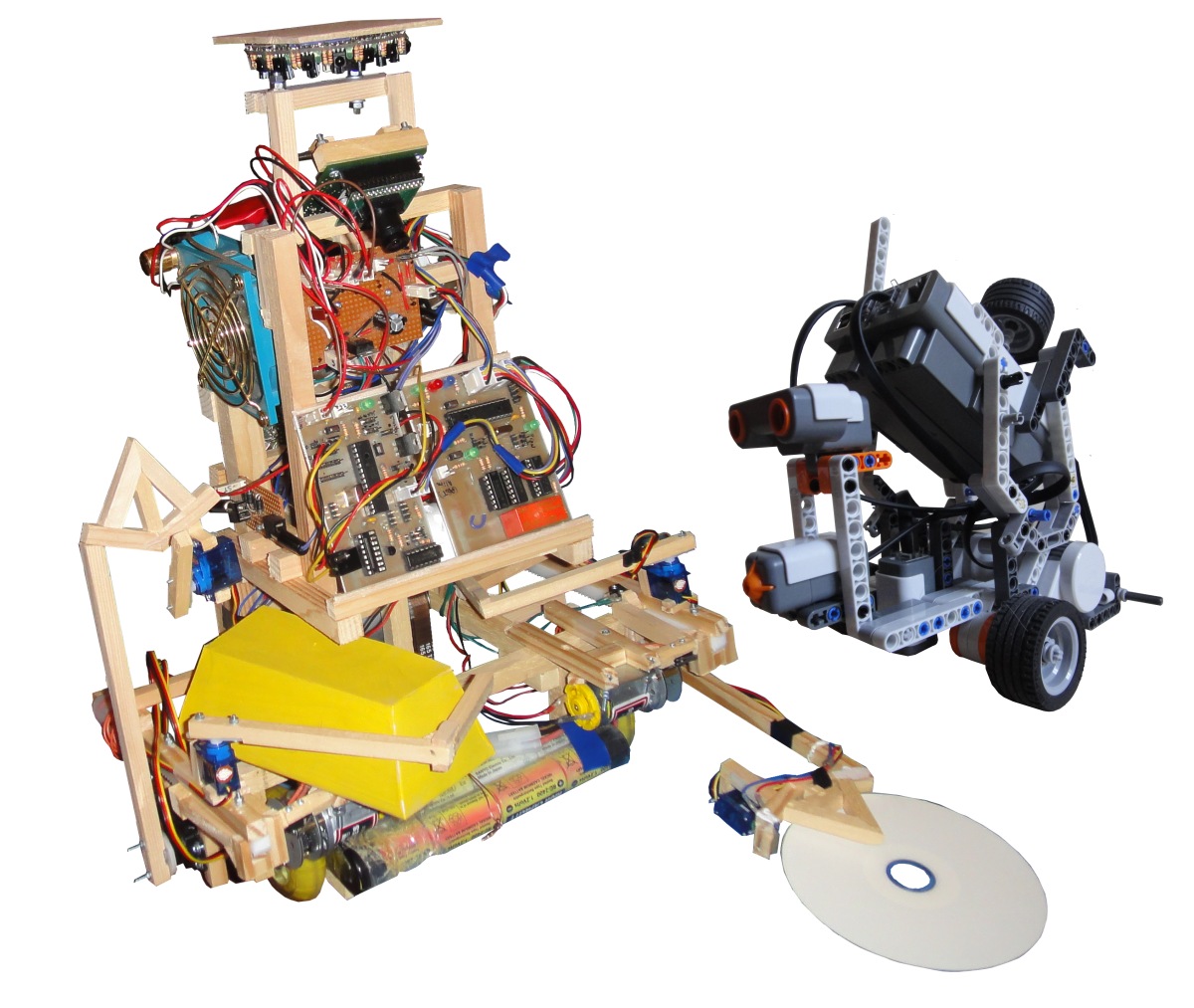
Pince-Mi et Pince-Moi 2012
Un troisième robot dans la lignée des deux premiers. Nous rajoutons une carte de plus pour gérer les actionneurs supplémentaires.
- Nous essayons des balises infrarouges que nous ne mettrons finalement pas au point.
- Nous essayons de développer un robot secondaire en Lego

Pince Mi et Pince Moi
Deuxième génération de robot
En 2013 Poivron Robotique fait une pause et revient en 2014... En pareil mais un peu différent. C’est notre seconde génération de robots, une base différentielle montée sur une planche en bois. Le reste est toujours construit avec des baguettes.
Rustique 2014
Pour la première fois, nous partons sur une architecture - presque - conventionnelle. Une base roulante dite "différentielle" avec deux moteurs de propulsion, un pour la roue gauche, un pour la roue droite. Par contre, nous refusons de mettre des roues codeuses indépendantes, que nous jugeons mécaniquement trop difficile à réaliser correctement. À la place, nous gardons un gyroscope pour que le robot garde une orientation précise...
- Gyroscope : fini le Wii motion plus qui n’était pas très précis, nous adoptons l’ADXRS453
- Moteurs MFA 919D11:1 + codeurs HEDR-5420-ES21
- Nouvelle électronique avec un dsPIC33FJ128MC802 pour lire les roues codeuses et piloter les moteurs avec des ponts en H A4950. Mais nous gardons un PIC18F4550 (quasiment identique aux PIC18F2550) pour la partie stratégie et gestion des capteurs et actionneurs. La description détaillée du robot est ici.

Rustique

Gousse et Petit pois 2015
Une année assez calme, d’un point de vue robotique. Nous reprenons le robot de 2014. Nous menons deux essais infructueux : une balise tournante et la communication avec un PC Linux.
Nous sommes assez fier de l’idée de se servir du robot principal pour transporter le robot secondaire, nous n’abordions pas de nouvelle technologie cette année.
Peut-être parce que cette année était bien remplie par ailleurs ?
Peut-être est-ce ce qui nous a décidé à faire une pause de quelques années ?
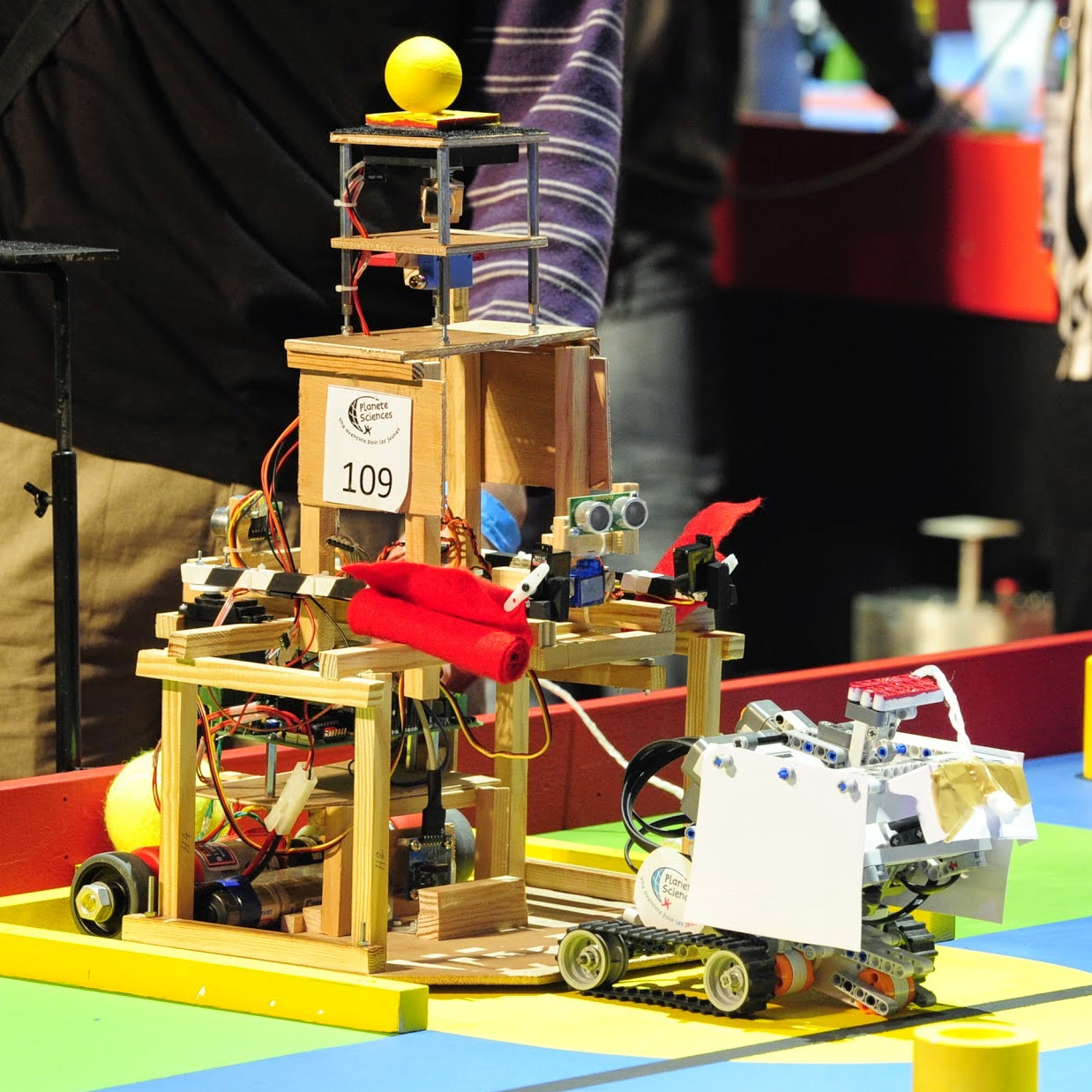
Gousse et petit pois
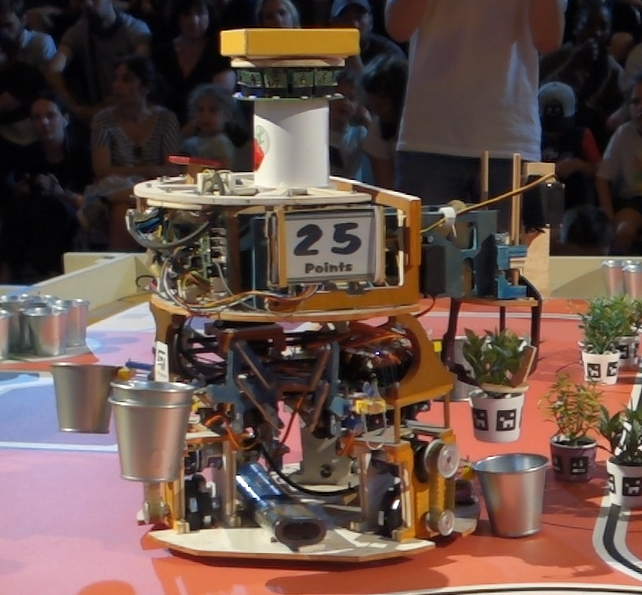
Capsicum 2022
L’année de la reprise, après 6 ans d’absence. Nous gardons la même base mais ajoutons :
- Un Raspberry Pi Zéro, pour avoir des logs et comprendre ce qui se passe sur le robot
- Un écran e-Ink : c’est très joli mais lent à rafraîchir. Pour indiquer notre score, c’est parfait !
Nous essayons également de contrôler le robot en Bluetooth, mais les impacts avec les autres composants du Raspberry Pi Zéro sont trop compliqués...
Capsicum réalise un bon classement. Ceci nous donne confiance et sera le début du club robotique de Riom, une aventure peu détaillée sur ce site. C’est aussi le tournant vers notre troisième génération de robots.

Capsicum
Troisième génération de robot
Notre troisième génération de robots est holonome, basée sur des RP2040 avec une mécanique réalisée à la scie à chantourner.
Hexa 2023
Hexa est le robot du changement :
- Un robot holonome
- Un nouveau micro-contrôleur, le RP2040 (Raspberry Pi Pico)
- Une mécanique réalisée à la scie à chantourner
- Un code de déplacement repris de zéro, avec une gestion fine des vitesses et des accélérations
- Une détection de l’adversaire basée sur les VL53L1X (capteurs dits "temps de vol" en infrarouge)
- L’utilisation d’une turbine
Nous gardons le gyroscope, l’écran e-Ink, la communication I2C, les moteurs à courant continu et leur codeur, les servomoteurs pour les actionneurs. Nous abandonnons le Raspbery Pi zéro, jugé trop contraignant.

Holonome Experience Xylo Asservi (HEXA) Holonome Experience Xylo Asservi (HEXA)
Mars 2024
Mars est dans la continuité d’Hexa, nous rajoutons :
- Les capteurs VL53L8CX
- Une mécanique qui doit faire rêver, entièrement réalisée à la scie à chantourner, avec une pince 3 doigts et 6 bras avec des aimants et des jolies découpes partout (grâce à un stage "découverte" sur la scie à chantourner).
- Une carte que nous avions en réserve, basée sur un PIC18F4550, elle nous permet de piloter les 16 servomoteurs du robot.
C’est l’introduction des PAMIs. Nous les développons avec les mêmes technologies que le robot principal (RP2040, capteur VL53L8CX, moteurs à courant continu et codeur). Ce qui nous permet de réutiliser le code de déplacement du robot principal pour nos PAMIs.
Mars
Commentaires
Administration du site
jung, le 19/12/2023
Hello Poivron-Robotique
Bon travail !!!
Ajouter un commentaire