Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !

Dernières nouvelles
Poster 2023 (et un petit point d’avancement)
9 mai 2023
À une semaine de la coupe de France de Robotique, voici notre Poster !
Ça a été l’occasion de nommer notre robot : HEXA, pour Holonome Expérience Xylo Asservi
(Notons que Xylo, du grec, signifie bois).

Poster 2023
La compétition approche et, même si nous avons attaqué les finitions, ce sont elles qui risquent de nous occuper sur la dernière semaine.
L’état du robot est le suivant :
- Il attend la tirette pour démarrer
- Il adapte sa stratégie en fonction de sa couleur
- Il attrape des cerises, va au panier, les lances et repart en chercher d’autres.
- Il s’arrête en cas d’obstacle devant lui
- Il déclenche le déguisement à la fin du temps imparti
- Il coupe les moteurs à la fin du temps imparti
Il faut encore rajouter un mini-bout de code pour afficher le score en fonction des actions réalisées ou pas.
Le gros bout manquant est l’évitement de l’adversaire. Pour l’instant, le robot s’arrête. Nous avons bien un bout de papier quelque part avec de jolies trajectoires d’évitement mais rien n’est codé.
Avancement
- Supervision
- Mesurer la tension de la batterie et détecter une batterie faible
- Être capable de récupérer des "logs" en fin de match
- Stratégie
-
Intégrer la détection de l’adversaire dans la stratégie: fait -
Enchaîner sur la prise des cerises proches du panier: fait - Enchaîner sur la prise des cerises au milieu de la grande bordure.
- Pseudo-fonctionnel, réglages à terminer
- Stratégies d’évitement à implémenter
-
- Fiabiliser la dépose des cerises : bien avancé, mais ce sera pour un autre article
- Écran :
-
passer la liaison SPI de 100 kHz à 4 MHz comme dans l’exemple: fait
-
Déguisement
1er mai 2023
C’est un des points que nous tenions à réaliser et que nous nous gardions pour la fin, parce que "ce sera facile".
Ben, pas tant que ça...
Le règlement propose un nombre conséquent de points si le robot change d’aspect à la fin du match. Nous voulions faire les choses bien, en restant dans le style de l’équipe.
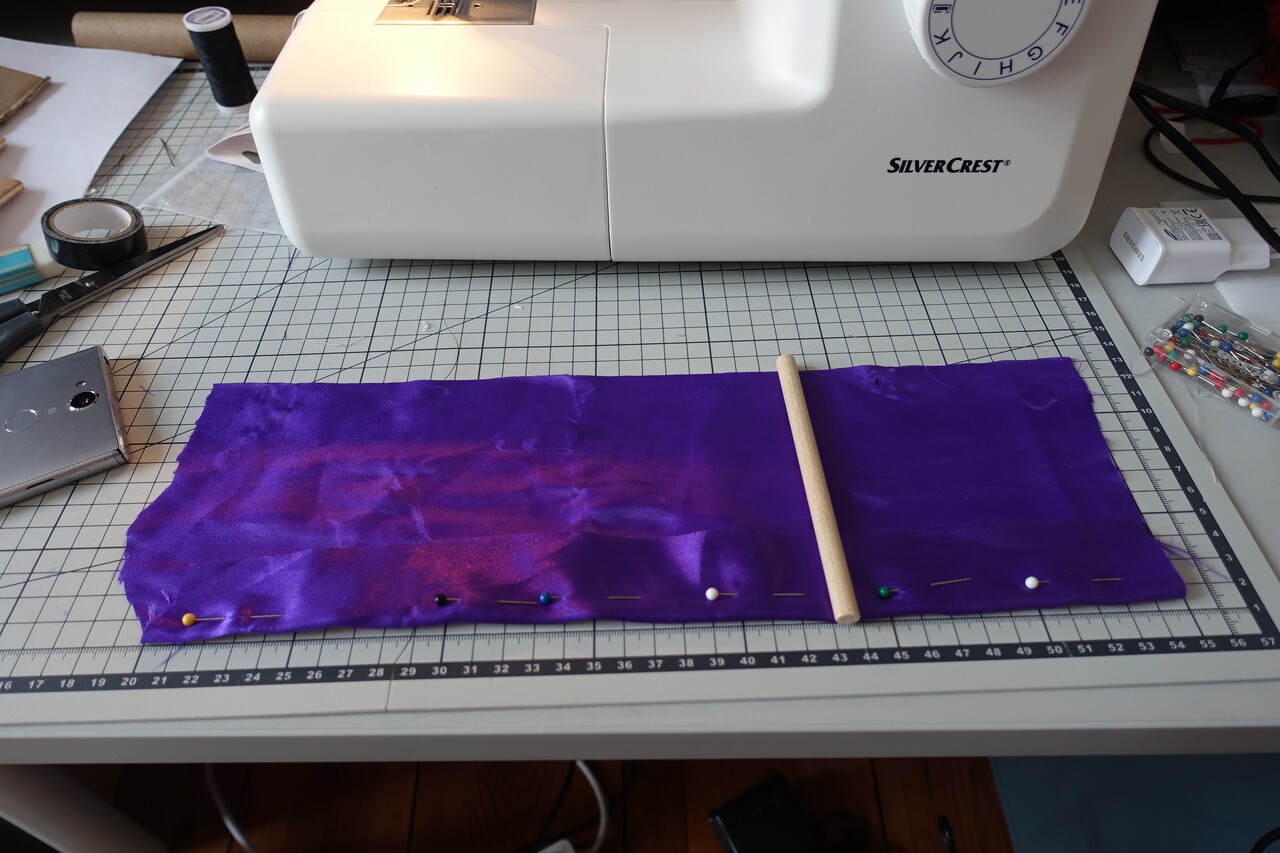
L’une des idées initiales était de faire un accordéon en papier qui se déplierait verticalement et propre à partir du toit du robot, en restant dans le périmètre initial (notre hexagone de 12,5 cm de côté) . Mais une petite analyse a vite montré que la solution se heurterait aux autres éléments en place dans le robot. Nous changeons notre fusil d’épaule et partons sur une solution à base de tissu lesté par une baguette de bois.
L’idée est d’avoir un morceau de tissu par face, soit 6 systèmes...
Nous arrivons assez vite à monter un prototype, cousu à l’arrache et agrafé à la structure du robot, utilisant un axe en bois et du fil de fer comme crochets. L’ensemble fonctionne bien. Sous le rouleau de tissus, nous fixons des baguettes à 45° pour retenir le tissu et éviter un déclenchement prématuré.

Déguisement, prototype enroulé.

Déguisement, prototype déroulé.
Voici le résultat en vidéo...
Prototype déguisement (720p - 3 Mo).
Y’avait plus qu’à...
Sauf qu’il manque encore un actionneur, en faire 5 autres et rallonger le tissu, car le pantacourt, ça fait négligé !
En faisant les différentes parties, nous trouvons évidemment des améliorations possibles, mais nous décidons de ne pas refaire les morceaux déjà réalisés juste pour un aspect esthétique. Ça nous aurait fait plaisir, mais nous sommes trop proches de l’échéance pour nous le permettre...
Après la perceuse et les pinces pour tordre le fil de fer, nous avons fait chauffer les aiguilles, que ce soit avec la machine à coudre ou à la main !
Déguisement en préparation

Le meilleur morceau du déguisement...
Puis il a bien fallu se faire un actionneur. La première piste, c’est un actionneur par face... Mais nous partons rapidement sur une solution avec un actionneur pour deux faces (moins cher, en argent et un entrées/sorties). Après analyse de l’encombrement de ces solutions, nous finissons par choisir de n’avoir qu’un actionneur pour les 6 côtés.
Nous suspendons un servomoteur au centre du robot, sous le toit, et relions chaque système avec du fil de cerf-volant à la pièce que nous avons découpée à la scie à chantourner et accrochée au servomoteur. La forme un peu bizarre est due au passage des câbles pour la carte de détection sous le support balise. La découpe est-elle vraiment utile, nous ne le savons pas !

Actionneur du déguisement
Le résultat nous plaît, même si le robot est plus joli sans son déguisement qu’avec !
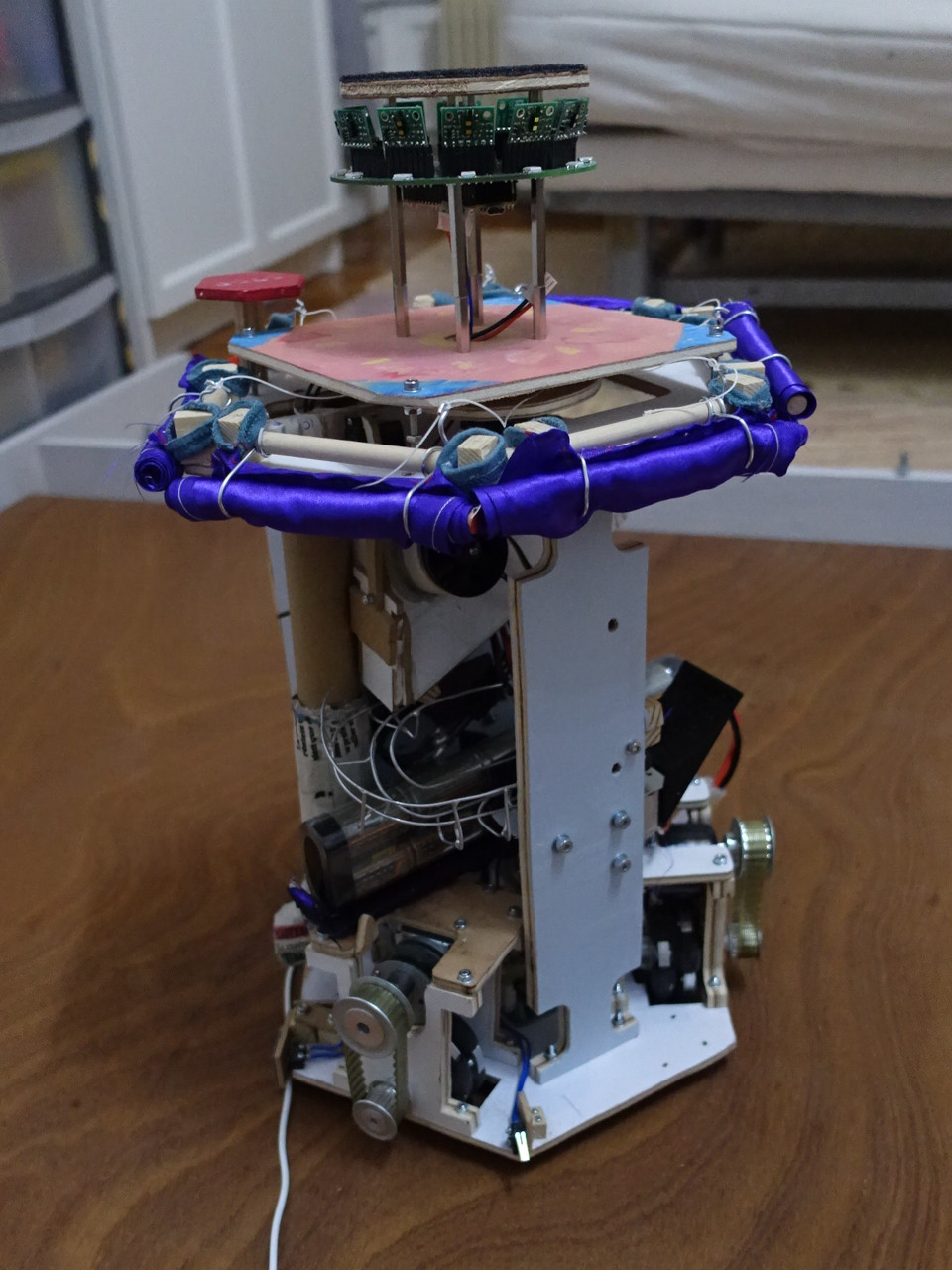
Déguisement plié

Déguisement déplié
Nous nous sommes quand même fait plaisir en gardant une visualisation sur l’affichage du score !
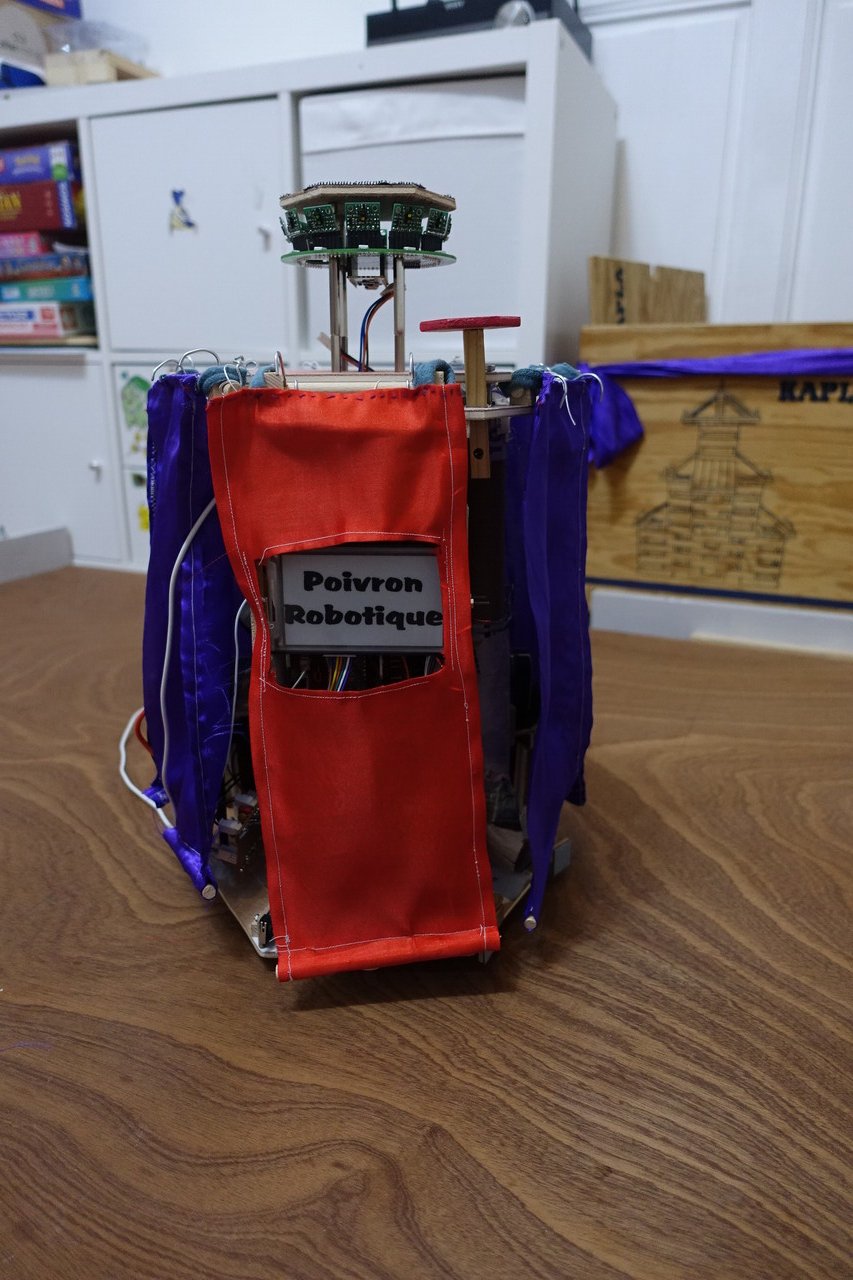
Déguisement et score
Et pour conclure cet article, le tout en vidéo !
Détection de l’adversaire et affichage du score
25 avril 2023
Après le retour de la CARAR 2023
La CARAR nous avait laissé un petit goût amer. Nous avions perdu du temps sur la gestion de la tirette, la détection de l’adversaire était dans sa forme la plus primitive et nous avions pris en défaut notre précieuse carte de détection. Et après tout ce temps passé sur le robot, l’un des membres souhaitait faire une petite pause. S’en suivi donc une semaine qui fut plutôt passée sur le panier que sur le robot...
Ensuite, il fallait savoir si la carte de détection pouvait poser problème... Au bout de deux séances d’essais, et la correction d’un bug potentiel, il fallut nous rendre à l’évidence. Dans certaines conditions, certes assez précises, un capteur VL53L1X peut détecter un obstacle à 35 cm alors qu’il n’y a rien à moins de 2 mètres devant lui. C’est quelque chose que nous avons pu reproduire, mais uniquement dans certains lieux.
C’est assez embêtant, mais en penchant les capteurs vers le bas, on devrait pouvoir contourner le problème, au moins partiellement...
Détection de l’adversaire
Nous avons accepté ce défaut, pour continuer de travailler sur la détection de l’adversaire. Le code utilisé lors de la CARAR stoppe net le robot dès qu’un objet est détecté à proximité. D’un côté, le robot risquait de basculer, de l’autre, une fois au contact d’un obstacle, il n’est pas possible de repartir.
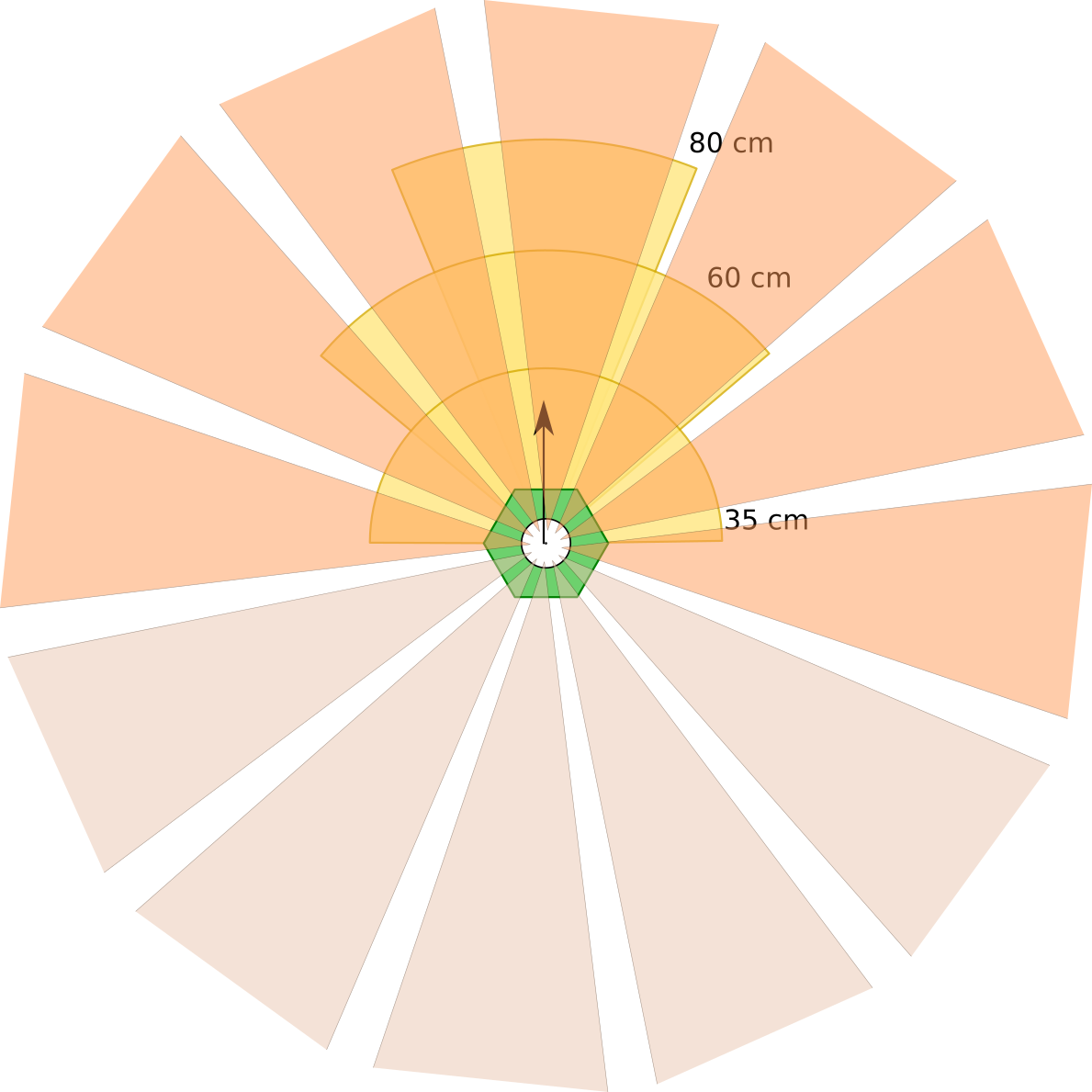
Nous avons dessiné des cônes de détection où nous souhaitons prendre en compte la présence d’un obstacle en fonction de la direction d’avancement du robot.

Zone de détection Zones de détection en fonction de la direction d’avancement du robot.
Chaque zone de détection d’un capteur est comparée avec le cône. Si les deux zones ne s’intersectent pas, le capteur est ignoré.
Selection des capteurs
Pour vérifier le bon fonctionnement du code, nous créons une fonction permettant d’éteindre les LEDs associées aux capteurs de la carte de détection. Ces indications nous seront précieuses pour le débogage du code.

Les LEDs, qui en s’éteignant, aident au debug.
Intégration avec les fonctions Trajets
Les fonctions Trajets nous permettent de suivre une trajectoire avec un contrôle fin de l’accélération et de la décélération. Une trajectoire peut être une droite, un arc de cercle ou une courbe de Bézier. La solution que nous avons trouvée pour coupler élégamment la détection avec les fonctions Trajets a été de tout piloter au niveau de la stratégie. Le principe est le suivant : la fonction Stratégie appelle successivement :
- Trajet_get_orientation_avance() : qui renvoie la direction dans laquelle avance le robot.
- Balise_VL53L1X_get_distance obstacle_mm(angle) : qui renvoie l’obstacle le plus proche en tenant compte de la direction d’avancement du robot.
- Trajet_set_obstacle_mm (distance_obstacle) : qui définit la distance pour laquelle la fonction Trajet_avance() calculera la courbe de décélération liée à cette distance lors du calcul de la consigne de vitesse.
De cette manière l’impact sur les fonctions Trajets est minime et le résultat est fonctionnel.
Affichage du score
Comme l’an dernier, nous utilisons un écran E-Ink pour afficher le score. Cette année, il est plus grand et nous souhaitons le piloter directement avec les microcontrôleurs Raspberry Pi Pico. S’il ne nous a pas fallu très longtemps pour afficher le test sur l’écran, charger des images s’est avéré bien plus compliqué.
Le code proposé n’est fait que pour charger des images faisant exactement la taille de l’écran. Le seul format pris en charge étant celui - non standard, mais compréhensible - du programme, un format binaire brut. Notre image étant bicolore, chaque octet code 8 pixels. Nous avons réutilisé des bouts de code du vendeur (Waveshare) en C fournis pour Linux pour convertir nos images sur le PC avant de copier les données dans le code en C. Un printf bien placé aurait fait l’affaire, mais nous avons voulu être intelligents et nous avons perdu beaucoup de temps...
Le processus était même plus complexe :
- Création de l’image dans Inkscape (ça, c’est facile), export en PNG
- Import de l’image dans GIMP, conversion de l’image en couleur indexée, 2 couleurs. Enregistrement en BMP.
- Utilisation de notre programme pour obtenir les valeurs en C
- Insertion des données dans le code C.
Mais à la fin, nous avons ce que nous voulions : un écran lisible de loin !

Intégration de l’écran
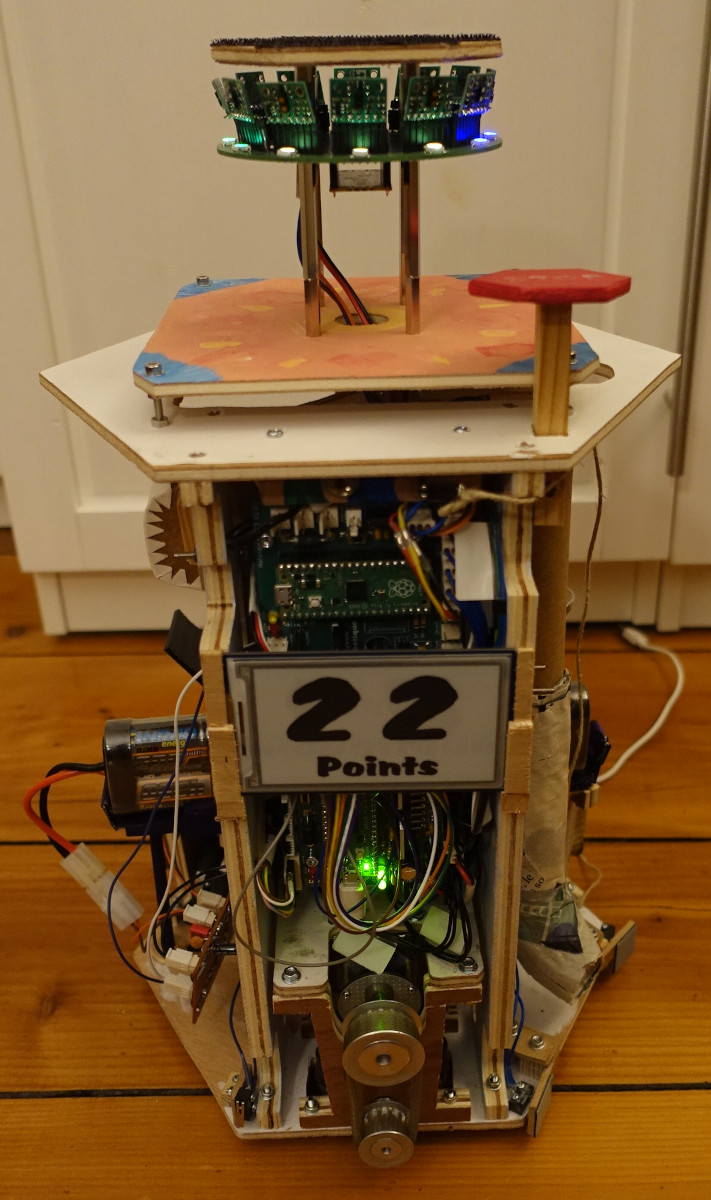
Affichage de 22 points !
Avancement
- Améliorer la détection de l’adversaire
-
Tester la perturbation par un capteur en face :Fait -
Éliminer les obstacles hors du terrain :Fait
-
- Supervision
- Mesurer la tension de la batterie et détecter une batterie faible
- Être capable de récupérer des "logs" en fin de match
- Stratégie
- Intégrer la détection de l’adversaire dans la stratégie :
- Code fait et globalement fonctionnel : A valider
- Enchaîner sur la prise des cerises proches du panier
- Enchaîner sur la prise des cerises au milieu de la grande bordure.
- Stratégies d’évitement à implémenter
- Intégrer la détection de l’adversaire dans la stratégie :
- Fiabiliser la dépose des cerises : bien avancé, mais ce sera pour un autre article
- Écran :
-
Coder l’affichage du score :Fait ! - passer la liaison SPI de 100 kHz à 4 MHz comme dans l’exemple
-
Mots clés : Programmation, Robot holonome, 2023, Raspberry Pi Pico
CARAR 2023 (INSA) - Homologuable !
2 avril 2023
Voici deux semaines qui ont été très chargées.
Au menu, intégrer les fonctions existantes pour créer un programme d’homologation et créer une ébauche de détection de l’adversaire.
Le programme d’homologation nous a réservé quelques surprises qu’il a bien fallu corriger, tandis que la détection de l’adversaire n’était qu’une ébauche avant notre départ pour la CARAR.
Après avoir pataugé bêtement pour faire fonctionner notre tirette, nous avons pu intégré la détection de l’adversaire sur place. Le robot était homologable.
Côté détection, une grosse mauvaise surprise : dans certaines conditions, lorsque le capteur n’avait pas d’obstacle à proximité, nous obtenions une valeur de l’ordre de 30 cm, pile dans la plage critique. C’est peut-être qu’un problème de code de notre côté, mais ça reste à confirmer !
Certes, il nous reste du travail, mais le robot commence à se montrer fiable sur un bon nombre d’actions et ça, c’est vraiment très important !
Match 3 - CARAR (720p - 12 Mo).
Nous avons également commencé à travailler sur notre panier définitif, mais il reste du travail :
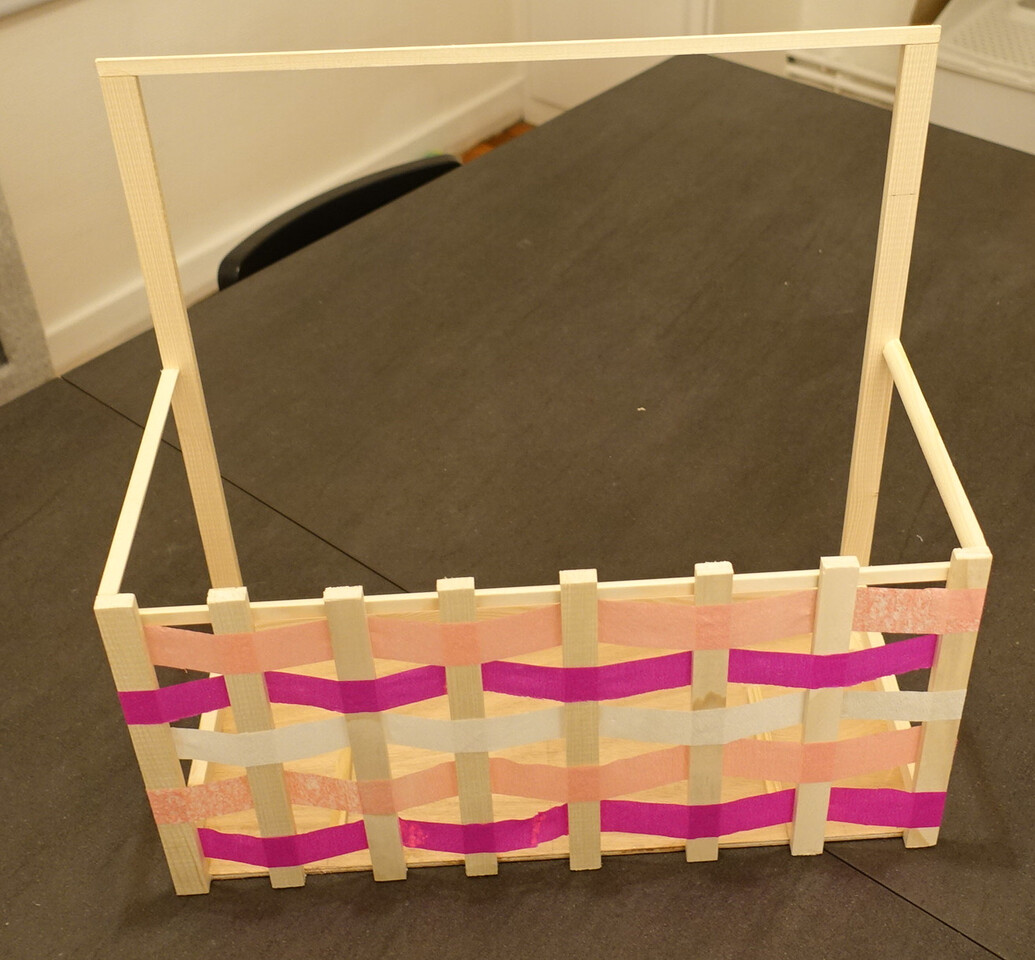
Futur panier
Avancement
Un bon nombre de nos tâches ont été terminées, et nous basculons maintenant sur la réalisation de la stratégie...
Du côté de nos tâches :
-
-
Propulseur - correction des perturbations électromagnétique: Corrigé-
Bouclier électromagnétique autour des moteurs (feuille de papier d’aluminium): fait mais pas très efficace... -
Changement de la fréquence de la commande : 50 Hz à 5 kHz: fait et efficace !
-
-
Rampe entre l’aspiration et le propulseur-
Certaines balles tombent, une rambarde à rajouter: fait !
-
-
-
Longer les bordures-
Translation en longeant: fait !
-
-
Transformer la base roulante en robot:-
Installer le mat balise: fait !
-
- Améliorer la détection de l’adversaire
- Tester la perturbation par un capteur en face : à faire
- Éliminer les obstacles hors du terrain
- Supervision
- Mesurer la tension de la batterie et détecter une batterie faible
- Être capable de récupérer des "logs" en fin de match
- Stratégie
- Intégrer la détection de l’adversaire dans la stratégie : fait, mais à améliorer
- Enchaîner sur la prise des cerises proches du panier
- Enchaîner sur la prise des cerises au milieu de la grande bordure.
Mots clés : Coupe, Vidéo, Robot holonome, 2023
Rampe pour les balles
19 mars 2023
La brève précédente manquait de photos.
Voici, pour nous rattraper, des vues du robot dans son état actuel. Avec une vue sur la rampe en fil de fer dont nous sommes assez fiers !
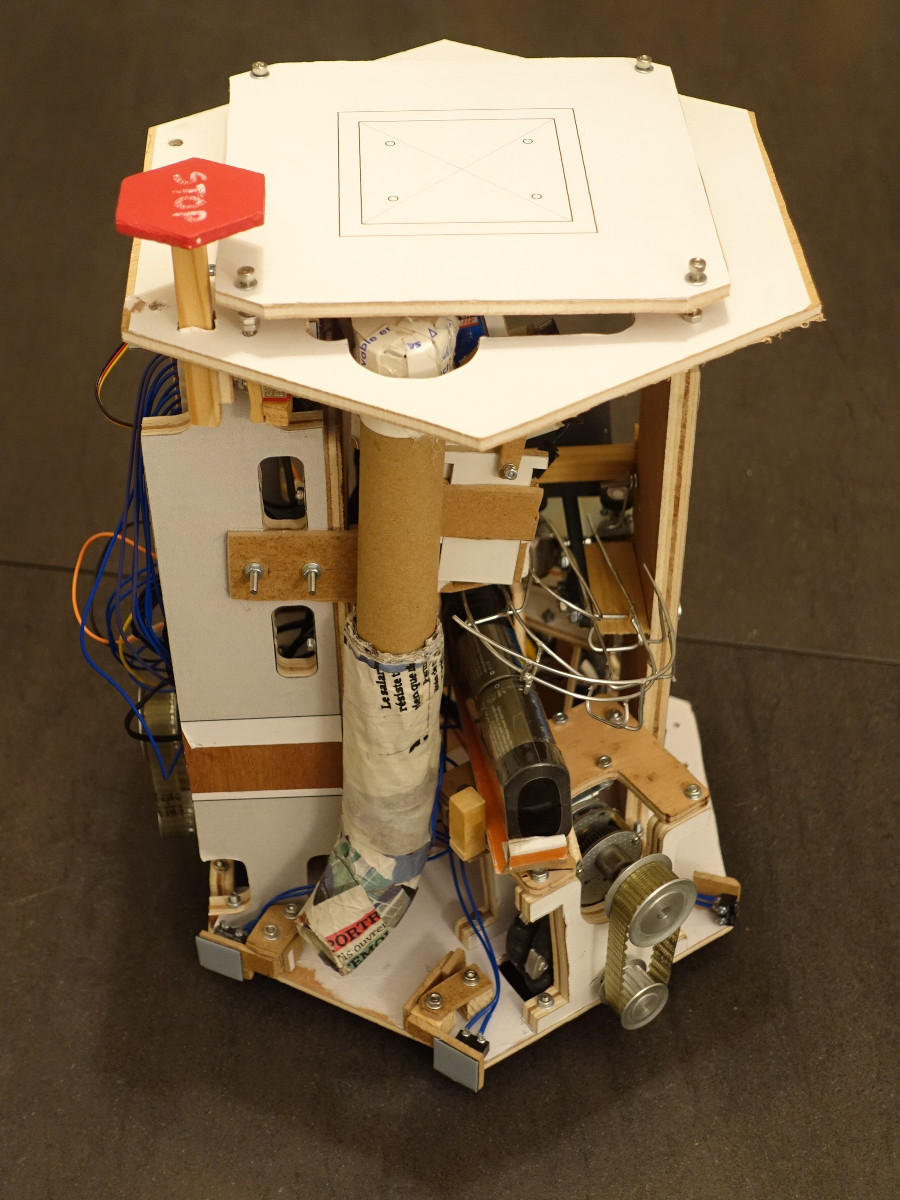
Vue sur la rampe

Rampe et propulseur
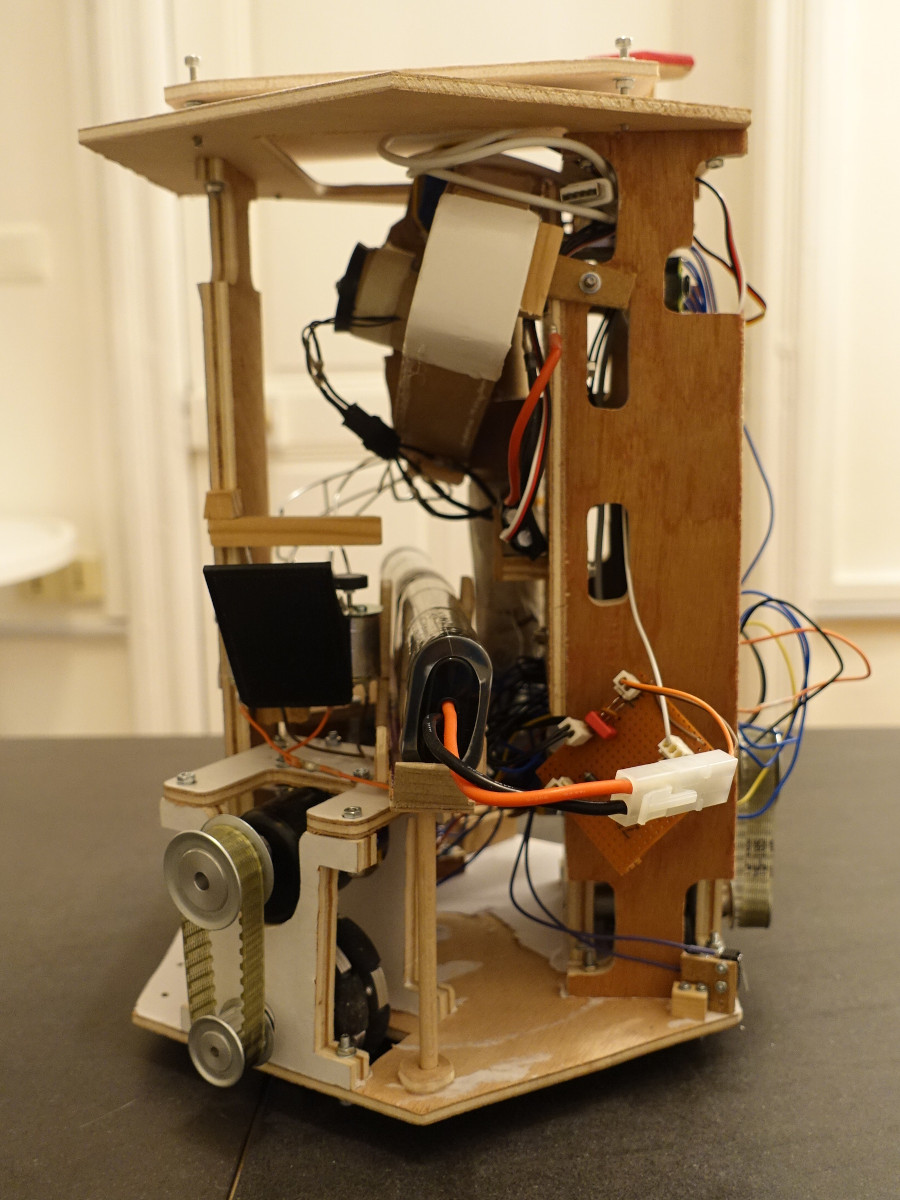
Face au propulseur
Et voici la rampe pour les balles en "fonctionnement" :
page précédente 1 ... 3 4 5 6 7 8 9 10 11 ... 37 page suivante
Administration du site