Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !
Dernières nouvelles
La pince à 3 doigts marche !
23 mars 2024
... mais ce n’est plus un grappin.
Après nos essais non-concluants, nous nous sommes remis au travail. Nous avons coupé les doigts du grappin, percer des trous pour pouvoir fixer différents types de doigts. Finalement, notre seconde itération s’avérera concluante.
Finalisation électronique
Nous avons fixé nos cartes électronique et raccordé la quasi-totalité de capteurs et actionneurs. Il ne manque que la tirette, le bouton de sélection de la couleur de l’équipe et le petit écran qui indique le score.
Ce qui nous a permis de reprendre le programme de l’an dernier et ses nombreux tests unitaires. Le début ne s’est pas fait sans mal :
❌Recompilation du code en mode test : pas de mode test
❌make clean puis recompilation en mode test : pas de mode test
❌rm -r build/* puis recompilation en mode test : mode test OK (c’est le cache du cmake qui posait soucis), mais pas de retour des codeurs
❌ Oh, le code de test n’initialise pas le module codeur : le code tourne, mais les codeurs sont à 0 en permanence
✅ Ah, oui, après relecture du plan de la carte, les codeurs ne sont pas alimentés par l’USB. On attrape l’arrêt d’urgent de l’an dernier, le connecteur pour la batterie, la batterie et Oh ! Les données arrivent !
✅ Quoi ? Pas de graphique teleplot pour nos codeurs : ça c’est corrigé !
La suite se déroule beaucoup mieux :
✅ Lecture des codeurs
✅ Pilotage des moteurs
✅ Asservissement des moteurs
✅ Lecture du gyroscope
✅ Localisation par codeur + gyroscope
Finalisation mécanique

Vue arrière du robot (mars 2024)
Nous fixons l’arrêt d’urgence (à cause du souci rencontré plus haut), le gyroscope et le capteur de détection des plantes (VL53L8).
L’arrêt d’urgence se base sur notre système habituel, une sorte de tringlerie en bois qui active un interrupteur à levier.

Arrêt d’urgence (2024)
Le gyroscope est situé à un endroit accessible, afin de facilement pouvoir y accéder en cas de soucis (notamment l’enfermer dans une cage en aluminium).

Gyroscope - sur le toit du robot
Et notre capteur est situé au milieu du robot, à hauteur des plantes qu’il doit identifier.

VL53L8 - Monté sur le robot
Programmation
Nous avons réglé les positions des 6 bras avec leurs aimants et rajouter sur la carte servomoteur, le code pour communiquer en I2C.
Le gros point restant est le traitement du capteur VL53L8 et la stratégie !
Mots clés : 2024, Mécanique, Programmation, Photo
Translation de la pince
14 février 2024
Ce dernier mois, la priorité n’était pas sur notre robot. Alors que nous étions plutôt bien partis côté planning, nous avons consommé une bonne partie de notre marge.
Mais nous avons quand même avancé !
Ensemble de la pince
Notre système de pince contient 3 axes :
- Un pour la fermeture de la pince
- Un pour l’ascenseur
- Un pour la translation
Nous avons conçu et assemblé le translateur. En l’installant sur le robot, nous installons notre 15ᵉ servomoteurs sur le robot. Voici la première version de la mécanique :
Translateur (face)
Translateur (côté)
La cinématique est sympa, avec le servomoteur qui avant et recule lorsque l’ensemble va de gauche à droite. Malheureusement, les performances ne sont pas au rendez-vous : le système met du temps à atteindre les positions extrêmes (ça se voit sur la vidéo ci-dessous) et pire, l’ensemble se bloque assez facilement.
Nous allons alors travailler sur une seconde version du translateur, où la course du servomoteur sera négligeable mais qui va nous faire gagner en rapidité et en fiabilité.
Alors nous tentons un test d’un cycle complet de manipulation de plante.
C’est l’occasion de critiquer la pince 3 doigts, où les frottements empêchent la pince de s’ouvrir et limite la force disponible lors de la fermeture. Nous changeons le point d’attache de la bielle pour améliorer grandement l’efficacité du mécanisme. Même si pour cela, nous devons revoir la fixation du servomoteur.
Il y aura bien encore quelques ajustements à effectuer, mais dans l’ensemble, les actionneurs du robot sont en place. Il est maintenant temps de re-travailler sur le déplacement et les capteurs (positionnement et traitement) !
La suite
- Changer le mini-servo de la pince 3 doigts, car il "croustille" : nous prendrons un MG90-S avec des pignons en métal au lieu de notre SG90.
- Régler les 5 positions des 6 bras
-
Finir de concevoir le 3ᵉ axe pour la pince 3 doigts - Rallonger les câbles des codeurs de moteurs
- Fixer le capteur de détection des plantes
Fixer la batterie et la carte électronique
Mots clés : 2024, Mécanique, Vidéo, Conception, Photo
Les bras montés sur le robot
5 janvier 2024
Préparation des bras
Nous vous avions présenté l’actionneur principal, notre pince 3 doigts. Il est temps maintenant de vous présenter nos actionneurs "secondaires". Il s’agit des petits bras qui tiendront les pots. Nous vous avions donné un aperçu du prototype fin octobre dans cette brève.
Revenons en détail sur fonctionnement du bras, il est composé de deux parties. La première partie permet de lever et d’écarter le pot du robot, c’est la partie la plus visible ci-dessous :

Bras pour pot - pré-série
La seconde partie approche ou éloigne un aimant du pot pour le prendre ou le lâcher.

Nous avons d’abord réalisé un prototype, puis une version pré-série. Enfin, nous décidons de réaliser la série. Pour cela, il faut découper les pièces :

Pièces pour les bras pour les pots
Puis il faut percer les pièces avec précision. En fonction, soit nous perçons les pièces ensembles, 2 à 2, ou nous nous servons de gabarits de perçage pour être répétable.
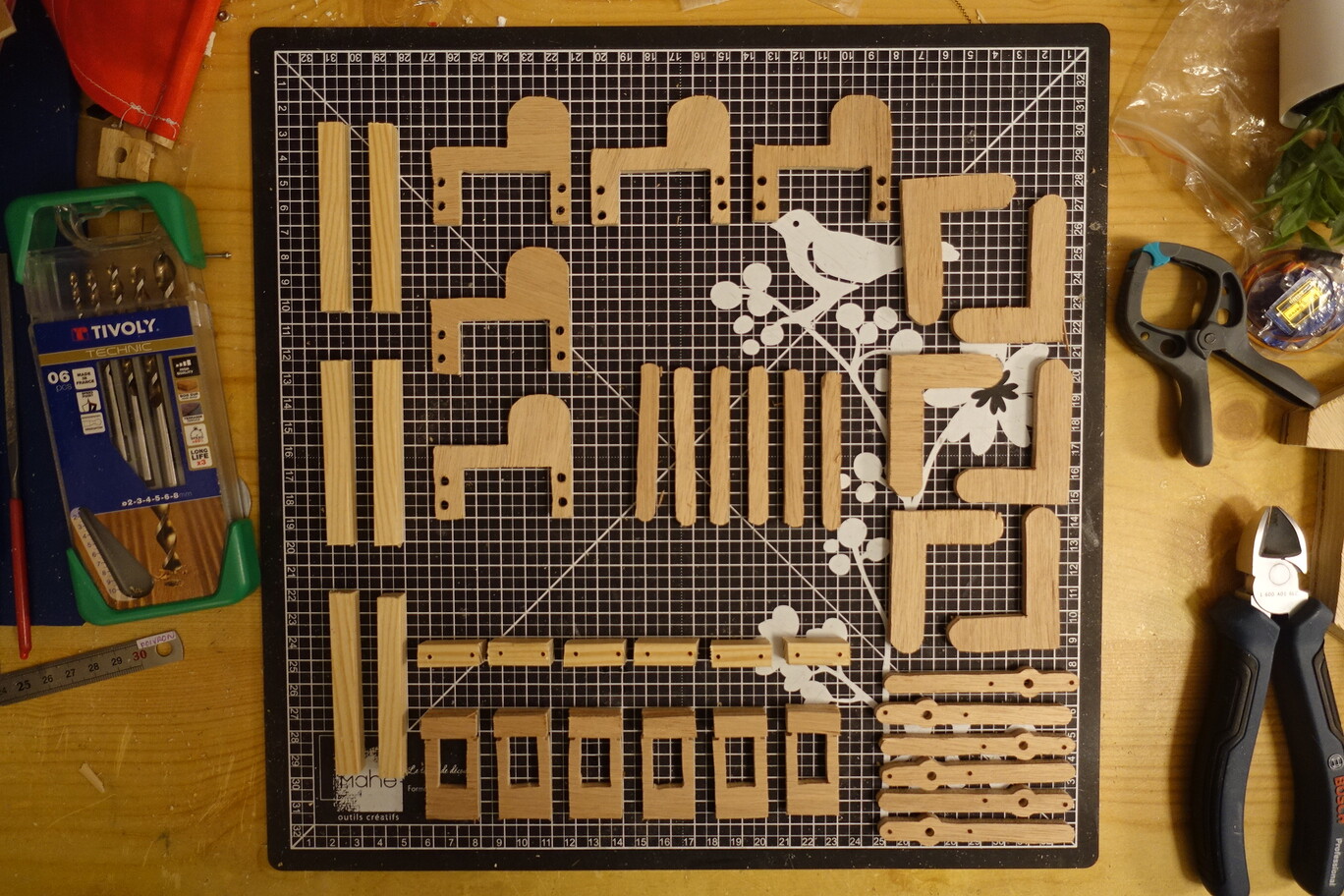
Pièces percées
On ne dirait pas comme ça, mais c’est un peu de boulot de percer ces pièces !
Préparation du châssis
En parallèle, nous découpons le châssis.

Châssis du robot 2024
Nous perçons les trous de fixation des moteurs. Pour cela, nous utilisons l’ancien châssis comme gabarit et obtenons rapidement une sorte de base roulante.

Mécanique de la base roulante
Assemblage des bras
Il va falloir assembler les bras de manière à respecter la position des pots prévue initialement.

La base roulante sur son plan
Vous n’aurez pas de photos de l’assemblage des 6 bras. Avec la visserie, il y a plus d’une cinquantaine pièces par bras. Bref, ça nous a pris un peu de temps, mais le résultat est là :

Base roulante avec pots
Et en détail (notons qu’il manque le pignon et la bielle entre le servomoteur et l’aimant) :

Bras qui tient un pot

Bras qui tient un pot
Ce qui donne en action :
La suite...
La suite, car nous sommes loin d’être en avance sur la planning, se compose principalement des tâches suivantes :
- Régler les 5 positions des 6 bras
- Finir de concevoir le 3e axe pour la pince 3 doigts
- Rallonger les câbles des codeurs de moteurs
- Fixer le capteur de détection des plantes
- Fixer la batterie et la carte électronique
Ensuite, nous pourrons commencer les déplacements sur le terrain !
Mots clés : 2024, Conception, Photo, Mécanique, Vidéo
Démontage d’HEXA
27 décembre 2023
Eh oui, nous démontons notre précieuse création. Mais c’est surtout que nous avons bien appris avec ce robot et que nous souhaitons en réaliser un autre sur une structure proche.
Nous l’avons donc mis en pièces :

HEXA en pièces détachées
Ce que nous allons récupérer (en lettre) :
A : La batterie 12V NiMh
B : La carte électronique avec ses 2 Raspberry Pi Pico et ses 3 ponts en H
C : Les 3 blocs moteurs
D : Notre précieux gyroscope (pas vraiment mis en valeur sur la photo)
E : Notre carte de détection de l’adversaire, à base de VL53L1X
F : Notre logo poivron (on ne sait pas où il sera, mais il sera probablement sur le robot)
G : L’écran pour afficher le score
Ce que nous ne réutiliserons peut-être pas (en chiffre) :
1 : Montants verticaux et support pour la carte électronique
2 : Le toit avec le système de déclenchement du déguisement
3 : Notre bras, rajouté à l’arrache
4 : Les contacteurs pour détecter et longer les bords
5 : Le troisième montant vertical avec le propulseur
6 : Turbine, chambre d’aspiration et trompe
7 : Rampe pour guider les cerises jusqu’au propulseur
8 : Le châssis
Mots clés : 2024, 2023, Conception, Photo
Notre projet, un ascenseur et de la mécanique
10 décembre 2023
Du robot 2024 en général
Planète Sciences nous demande, pour participer à la coupe de France de Robotique, de produire une présentation de notre projet scientifique et technique. L’an dernier, nos axes principaux étaient :
- La maîtrise d’un robot holonome,
- L’utilisation du Raspberry Pi Pico
- L’utilisation de courbe d’accélérations et de décélération
Globalement, nous avions tenu nos objectifs.
Cette année, notre projet, c’est d’avoir un robot qui impressionne, qui crée un effet "Wahou !". Pour cela, nous voulons :
- une mécanique qui tire avantage d’un robot holonome
- une réalisation en bois, à la scie à chantourner
- un robot joli avec du bois teinté
Évidemment, une fois que nous avons annoncé cela, le risque de vous décevoir est grand. Mais tant pis, on y va !
Donc le but est de saisir les plantes avec une pince "3 doigts", celle présentée sur la brève précédent. Cette pince est montée sur un ascenseur (voir plus bas) et l’ensemble sur un translateur. Cette mécanique permet de prendre la plante et de la poser dans un pot, situé à gauche ou à droite de la pince.
Mais 2 pots ne nous suffisent pas ! Nous voulons en transporter 6. L’idée vient donc de les porter autour du robot, formant un hexagone. Une fois que les pots adjacents à la pince ont reçu leur plante, le robot lâche ses pots, tourne sur lui-même de 120° et rattrape ses pots. Ainsi les pots adjacents à la pince sont de-nouveau vide.
Voici deux vues issues de la modélisation.
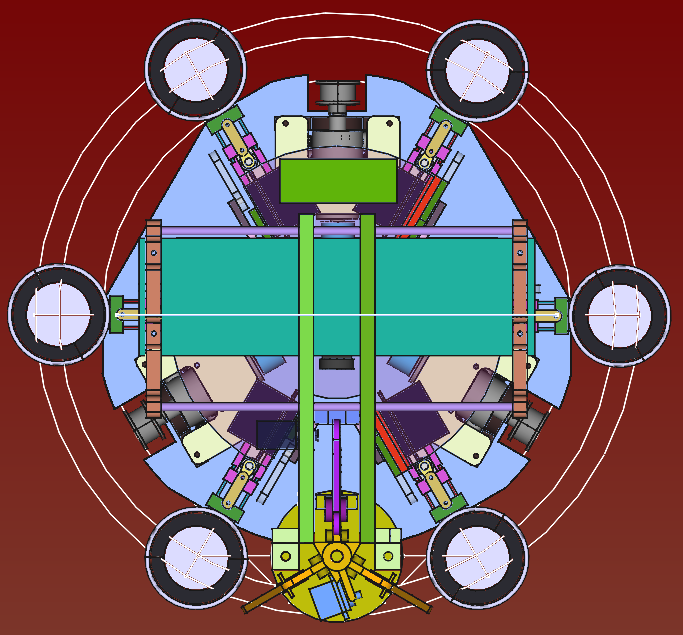
Vue de dessus du robot 2024
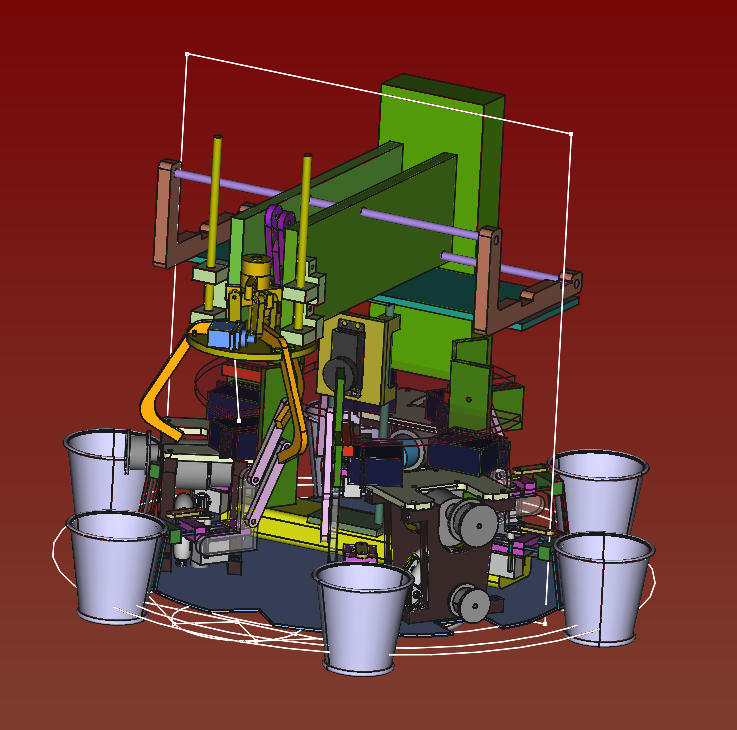
Vue 3/4 du robot 2024
Ce qui implique d’avoir 6 bras pour les pots.
Donc pour résumer, il nous faut :
- Une pince 3 doigts : OK
- Un ascenseur : OK (si, si, regardez plus bas)
- Un translateur : c’est en cours
- 6 bras pour les pots : prototype : ok, pré-série : ok.
Nous venons de finir le modèle "pré-série" pour les bras pour les pots. Ceci nous va nous permettre de continuer la modélisation 3D du robot et de réaliser les 6 bras prochainement (mais pas demain, hein !).
L’ascenseur
L’ascenseur, se base sur un principe (aimablement) piqué à l’équipe Les Karibous : un servomoteur, une bielle, une manivelle et un guidage. Avec ça, le tour est joué.
La mécanique
Nous vous avons beaucoup parlé de la mécanique. Nous mettons nos fichiers à disposition !
Mots clés : 2024, Mécanique, Vidéo, Photo, Conception
page précédente 1 2 3 4 5 page suivante
Administration du site