Avancement mi-Avril 2022
12 avril 2022
Oh la la ! Nous n’avons rien publié depuis fin janvier ? Mais pourtant, il s’en est passé des choses !
Tout d’abord, nous avons installé les capteurs ultrason sur notre robot. Nous avons surtout travaillé la mécanique, le code sera fait plus tard.
Ensuite, nous avons réalisé notre "vitrine" tel que demandée dans le règlement pour une démonstration à Vaulx-en-Velin (Lyon) à l’occasion de la coupe Eurobot junior d’Auvergne Rhône-Alpes (le 19 mars 2022).
Puis nous avons acquis un petit écran e-ink pour afficher nos points. Mais son intégration sur le robot n’est pas pour cette semaine.
Enfin, nous nous préparons actuellement pour la coupe Off Eurobot d’Auvergne Rhône Alpe (pas junior, cette fois-ci). Nous peaufinons les trajectoires, commençons la gestion des camps de départ. Jusqu’à présent, nous ne travaillions que d’un seul côté... Il nous manque notre mât balise que nous essayerons d’avoir pour ce week-end.
Installation des capteurs ultrason
Nous utilisons des capteurs SFR05, tenus dans un berceau :

Ce berceau est monté sur un axe en bois :

Et pas loin de cet axe en bois, nous avons un système de poulies.

Évidemment, qui dit poulies, dit système de tension de courroie. Celui-ci nous a vraiment donné du mal.

Mais le résultat est là, nous avons deux capteurs ultrason qui peuvent regarder soit devant, soit derrière.

Et une vidéo du système monté sur le robot avec un pilotage "manuel" du servomoteur.
La vidéo est disponible en 720p ici (Ogg - 5 Mo).
La vitrine
La vitrine rapporte un certain nombre de points, que ce soit par elle-même (2 + 5 points), ou en comptant les points de la statuette sur la vitrine (15 points).
Notre but était d’avoir ; pour la Coupe Junior Auvergne Rhône-Alpes, une vitrine qui fasse une démonstration des technologies simples que nous utilisons sur notre robot. À côté de cette vitrine, nous avions 3 posters présentant :
- Le capteur IS471F
- Les servomoteurs
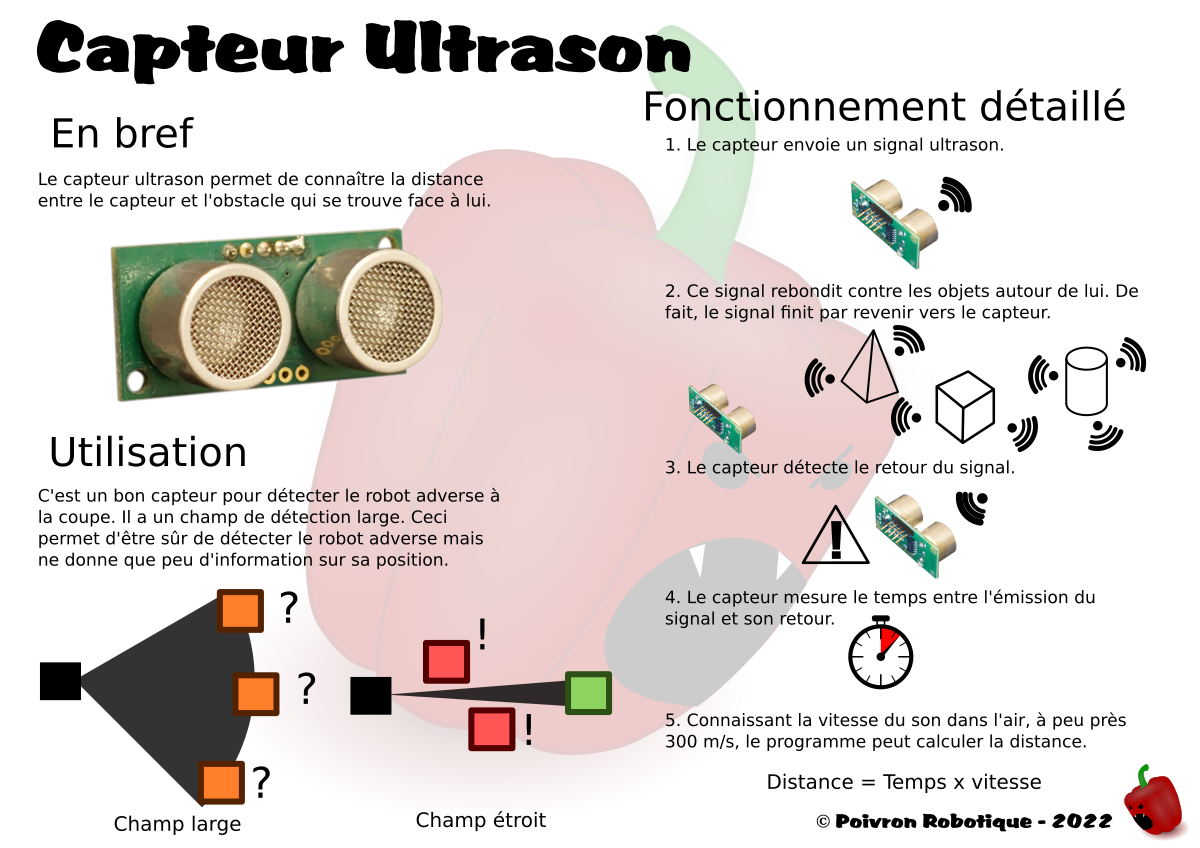
- Le capteur ultrason (que nous n’avions pas sur la vitrine)
Voici nos posters, en commençant par le capteur IS471F :

Puis les capteurs ultrason :
Et enfin les servomoteurs :

Et le robot dans tout ça ?
Nous avons réactivé le code de détection d’obstacle et adapté notre nouvelle gestion des trajectoires pour en tenir compte.
Puis fiabilisé la dépose de la statuette et l’arrêt en zone de départ, grâce à un recalage avec un capteur Sharp infrarouge. Nous croisons les doigts pour que ça marche à la coupe, mais le capteur est bien caché, protégé des projecteurs.
Et enfin, corrigé un bug qui ne nous permettait de faire tourner le robot sur lui-même que vers la gauche (les angles négatifs étaient mal gérés à cause d’une erreur de type)...
Lors de la coupe junior, nous avons vu que le robot se coinçait contre l’abri de chantier et que les carrés de fouille étaient trop lourds pour notre servomoteur. Nous avons limé ce qui dépassait et changé le servomoteur pour un du même gabarit mais deux fois plus puissant.
La vidéo est disponible en 720p ici (mp4 - 18 Mo).
Commentaires
Il n'y a pas de commentairesAjouter un commentaire
Administration du site