Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !
Dernières nouvelles
Wifi et asservissement polaire
29 mars 2014
Voila deux mois que nous n’avions pas donné de nouvelles. Disons que notre robot nous occupait trop pour qu’on puisse écrire des articles.
Nous avons pas mal avancé sur la propulsion du robot. Chaque moteur est asservi en vitesse, la position du robot est estimée à partir du gyroscope (pour son orientation) et des codeurs des moteurs (pour l’avancement). Nous obtenons une position fiable tant que les roues ne glissent pas. Pour éviter les glissements, nous limitons les variations de consigne de vitesse en entrée de l’asservissement des moteurs. Pour atteindre la position souhaitée, nous avons eu la joie d’implémenter un asservissement polaire, tel que celui décrit par RCVA.
Ça semble bien marcher, mais comme nous n’avons pas bien fixé notre gyroscope, il nous faut délaisser la programmation au profit d’un peu de mécanique avant de valider tout ça.
Enfin, pour communiquer avec le robot lors de ses déplacements, nous avons configuré le Wi-Fi sur notre Raspberry Pi. Notre article détaille la configuration pour transformer un Raspberry Pi en point d’accès Wi-Fi.
Côté gyroscope, avec tout ce code qui a été rajouté, nous ne sommes plus capables de le lire toutes les 50 µs. Nous sommes tombés à 500 µs en espérant pouvoir à nouveau augmenter la fréquence de lecture une fois le reste du code terminé.
Mots clés : Essais, Programmation, Raspberry Pi
La liaison série du Raspberry Pi
29 janvier 2014
Ayant du tripatouillé un peu pour faire marcher l’UART sur le Raspberry Pi, nous avons récupéré nos notes pour en faire un petit article disponible ici, sagement rangé dans notre rubrique Raspberry Pi.
Mots clés : Programmation, Raspberry Pi
Gyroscope opérationnel !
27 janvier 2014
Nous avons eu un peu de mal, mais nous avons enfin un gyroscope opérationnel !
Nous récupérons une valeur toutes les 50 µs, ce qui est énorme comparé à notre précédent gyroscope. Nous n’étions qu’à 4 ms. Ceci nous permettra de garder un angle précis même lors de petits chocs !
Concernant le reste de la carte électronique, il reste encore un peu de travail. Nous avons passé beaucoup de temps sur les protocoles de communication. Ceci nous permet de déboguer plus facilement notre code. C’est ainsi que nous avons fini par comprendre que notre code était bon et que malgré la fiche technique de notre gyroscope (ADXRS453) il fallait le calibrer.
Un petit schéma de ce qui nous reste à faire :
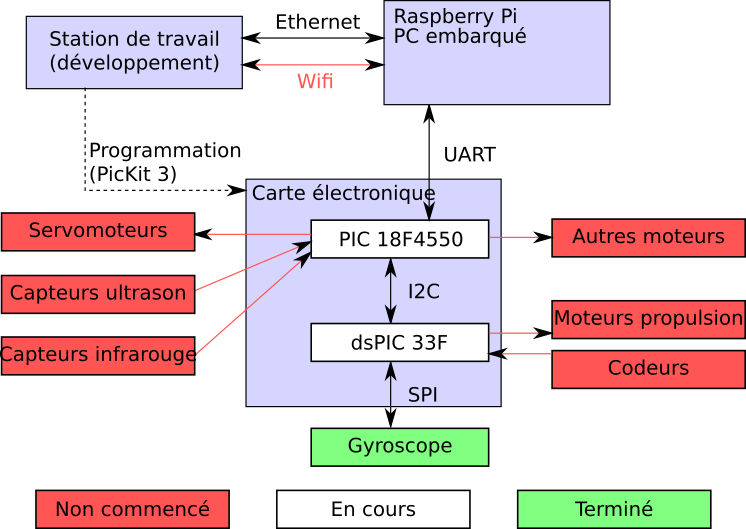
Architecture électronique
Ça a l’air énorme, mais le gros du travail se trouve autour des moteurs de propulsion et des codeurs. Nous avions déjà codés la gestion des servomoteurs et des capteurs ultrason sur un microcontrôleur quasi-identique les années précédentes. Si tout se passe comme pour l’I2C, ajouter la gestion des capteurs et des servomoteurs devrait nous prendre une petite semaine.
Enfin dernier point qui nous cause du soucis : nous n’avons pas encore alimenté la partie puissance de notre carte. C’est à ce moment là que nous risquons de causer de dégâts !
Mots clés : Électronique, Programmation
Architecture logicielle et courant farceur.
7 octobre 2012
Voici deux nouveaux articles dans notre rubrique odomètrie.
Le premier décrit notre architecture logicielle pour notre carte moteur et l’attribution de fonctions aux modules matériel du PIC.
Le second décrit les obstacles que nous avons rencontrés lors de notre tentative d’asservir en couple notre moteur.
Mots clés : Conception, Électronique, Programmation
Les registres du Raspberry Pi
8 juillet 2012
Pour ceux qui ont déjà travaillé avec des microcontrôleurs, les pilotes Linux peuvent sembler contraignant, bien que simples à utiliser.
Oui, sous Linux, on peut envoyer des données sur un port série comme si on écrivait dans un fichier ! Mais il n’est pas aisé de spécifier une vitesse exotique pour ce même port série.
Nous nous sommes donc intéressé à l’accès aux registres de la puce du Raspberry Pi. Notre article est ici
Nous avons également rajouté une vidéo pour notre article précédent, traitant de l’I2C sur le Raspberry Pi
Mots clés : I2C, Programmation, Raspberry Pi, Site
Administration du site