Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !

Dernières nouvelles
Carte Holonome 2023 - La doc !
13 novembre 2022
Après plusieurs essais, nous avons enfin la documentation de notre carte.
La bibliothèque Pinion, que nous utilisons, ne se porte pas très bien. Les différentes briques logicielles semblent avoir évolué séparément et la dernière version Pinion ne semble pas compatible avec les dernières versions de ses dépendances pcbdraw et pcbnewTransition.
À l’heure actuelle, la dernière version livrée est la 0.2.0. Pour l’utiliser, il faut installer manuellement pcbdraw en version 0.8.0 et pcbnewTransition en version 0.1.0 :
pip3 install pinion==0.2.0
pip3 install pcbdraw==0.8.0
pip3 install pcbnewTransition==0.1.0Pour construire cette visualisation de la carte nous avons suivi notre article sauf que nous avons modifié cette ligne dans le fichier template.py :
# p.insert(0, "name", f"{footprint.GetReference()}.{pad.GetName()}")
p.insert(0, "name", f"{pad.GetNetname()}")
Ainsi, la configuration générée lie les broches du même signal entre elles.
Mots clés : Conception, Électronique
Journal - 3 novembre 2022 - Aspiration et Gyroscope
3 novembre 2022
Deux semaines qui n’ont pas été des plus fructueuses, mais nous avons quand même quelques avancées à présenter...
Le gyroscope et le Rpi Pico
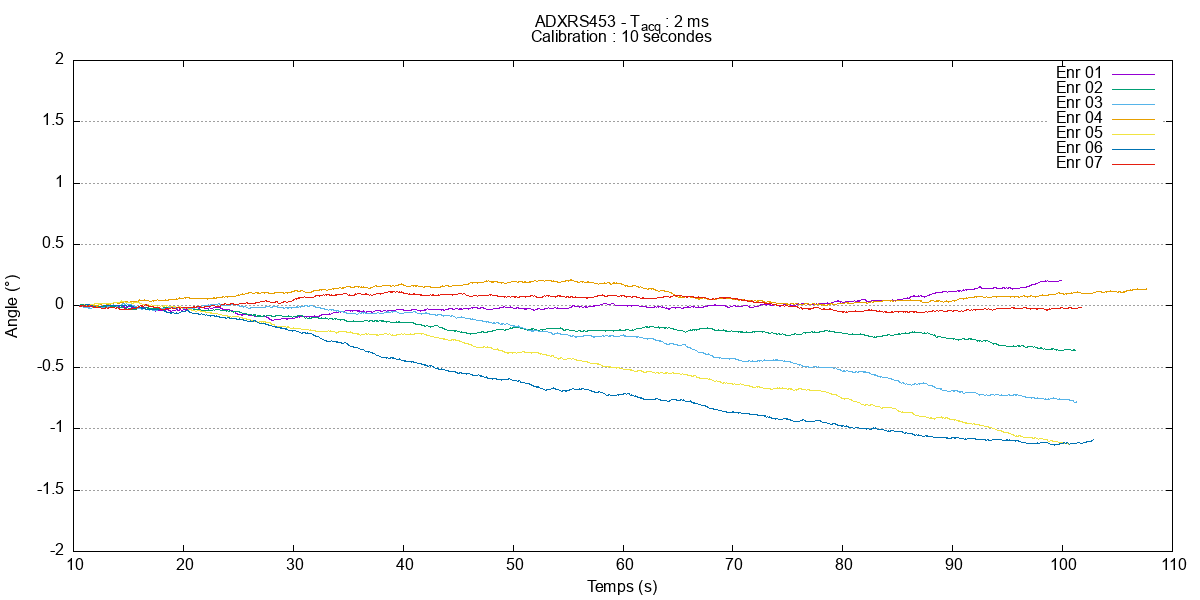
Nous sommes passés à l’ADXRS453, censé être plus stable. Nous avons eu du mal à obtenir nos premières valeurs et les premières mesures n’ont pas montré de différences significatives avec notre L3DG20H.
En statique, la vitesse renvoyée varie de +/- 0,01°/s sur les deux modèles.
L’ADXRS453 a quand même plusieurs points pour lui, notamment une compensation de la température intégrée. Les résultats en intégrant la vitesse sur 90s sont entre corrects et bons.
Côté mécanique - Aspiration des balles
C’est l’aspiration des balles qui nous fait transpirer en ce moment. Notre premier prototype en papier et carton montrait que la turbine avait une puissance d’aspiration suffisante pour attraper les balles.
Notre second prototype avait pour mission de :
- Montrer la faisabilité technique d’utiliser du papier mâché
- Valider les grands principes de fonctionnement : avoir un tuyau large pour limiter les pertes de charge du flux d’air et utiliser un guide à l’intérieur du "tuyau" pour dévier les balles du flux initial.
Réalisé en papier mâché, il a fallu le découper dans la longueur pour extraire le "moyeu". Notons l’astuce du papier d’aluminium pour éviter que le papier mâché colle à la forme !

Ce qui permet d’installer les guides, ici en fil de cuivre, pour dévier la balle du flux d’air.

En recollant les deux morceaux, nous obtenons notre pièce terminée.

Les résultats ne valident pas intégralement la solution. Le système attrape les balles/cerises mais dès que le tuyau s’élargit, l’aspiration n’est pas suffisante pour continuer de soulever les balles, de les projeter contre le guide (qui est au-dessus des balles) et les sortir du flux. Par contre, l’utilisation du papier mâché donne des résultats satisfaisants. Il se découpe et recolle bien ! Ce qui nous incite à réaliser une nouvelle pièce qui pourrait être la pièce finale. Il sera possible de la couper et recoller sans tout refaire de zéro.
Nous partons sur un conduit fin 26mm de diamètre, sur une séparation des balles du flux d’air sur une section relativement horizontale avec le flux d’air allant vers le haut, la balle vers le bas. Nous agrandissons aussi la section à cet endroit pour que la balle ne soit plus aspirée par le flux d’air. Et bien sûr, nous installerons le guide en fil de cuivre. Voilà le plan !

Le chant du signe de Capsicum
Capsicum, notre robot 2022 fera sa - probablement - dernière sortie dans 2 semaines. Nous avons l’occasion de présenter nos activités de robotique. Si vous passez dans le coin, venez nous retrouver à la médiathèque de Riom, le samedi 19 novembre 2022.
Est-ce que ceci nous motivera pour écrire une page de présentation pour Capsicum ? Peut-être...
Mots clés : Conception, Mécanique, 2023
Journal - 16 octobre 2022
16 octobre 2022
Un mois sans donner de nouvelles ! Comment avons-nous pu faire ça ? Et maintenant, nous avons tellement de choses à raconter, et pas trop de temps... Ce sera donc bref.
Le gyroscope et le Rpi Pico
Dans l’idée de se faire la main sur le Raspberry Pi Pico, qui servira de contrôleur sur notre prochaine carte électronique, nous testons alors le gyroscope L3GD20H. Nous observons des phénomènes un peu bizarres. Il nous faudra du temps pour comprendre que sur les 3 axes du gyroscope, celui que nous comptions utiliser (l’axe Z) est le pire des trois.
Nous mesurions une dérive régulière de 8°/minutes, en statique. Une analyse plus poussée montrera que cet axe met plus de temps à se stabiliser que les autres... Notre calibration se servait alors de ces valeurs fausses, créant cette dérive.

Gyroscope L3GD20H - traitement non-optimal
Les autres axes (X et Y) ne sont pas parfaits mais exploitables.
Déçus, nous achetons un second ADXRS453, pour voir si nous obtenons de meilleurs résultats. Les essais sont en cours.
Globalement, l’environnement du Rpi Pico manque un peu de légèreté, cmake est affreux, l’intégration à VS Code bien mais pas géniale. La puce reste puissante par rapport à nos anciens microcontrôleurs et la liaison USB est extrêmement pratique. L’intégration facile sur une plaque de test est aussi un très gros plus !
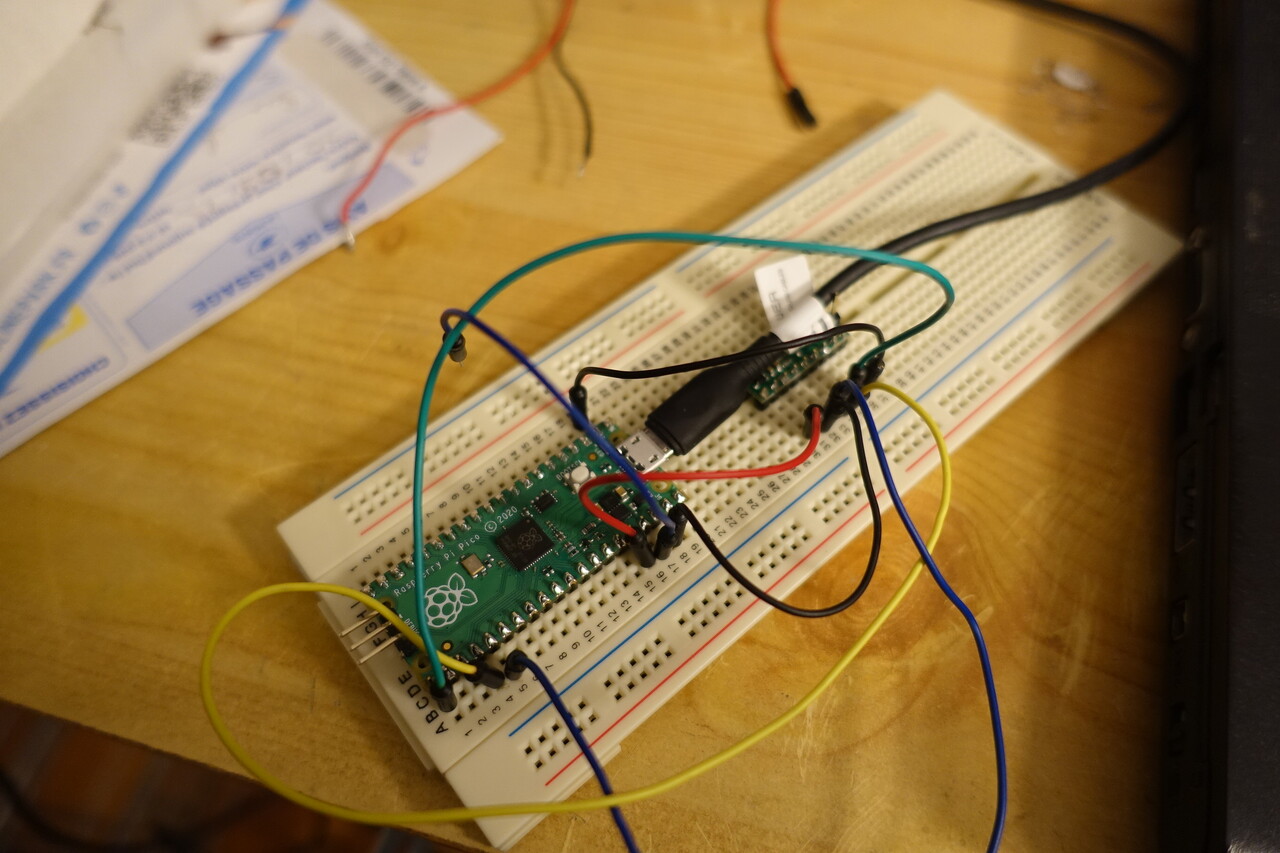
Rpi Pico et son gyroscope
Un petit mot sur la documentation. Si vous souhaitez bien maîtriser la bête vous aurez besoin des documents suivants :
- Le guide de démarrage rapide ;
- La fiche technique du Rapsberry Pi Pico (la carte) ;
- La documentation du SDK en C/C++ ou son pendant en python ;
- La fiche technique du RP2040 parce que le SDK en C/C++ ne couvre pas forcément tout ;
- La FAQ ne m’a pas été utile, mais ne pas la lire est certainement une erreur.
La carte électronique
Début octobre, nous nous sommes concentrés sur la carte électronique. Le schéma puis le routage dans la foulée. L’architecture se base sur 2 Rpi Pico reliés en I2C. Un qui gère le déplacement (moteurs, codeurs, gyroscope) qui sera le maître et gérera aussi la stratégie. L’autre analysera les capteurs et mettra les informations à disposition du maître. Comme nous avons eu peur que ça fasse juste en termes d’entrées-sorties, nous avons rajouté une extension d’entrées/sorties I2C (TCA9535).
Nous avons reçu la carte et les composants, y’a plus qu’à souder...
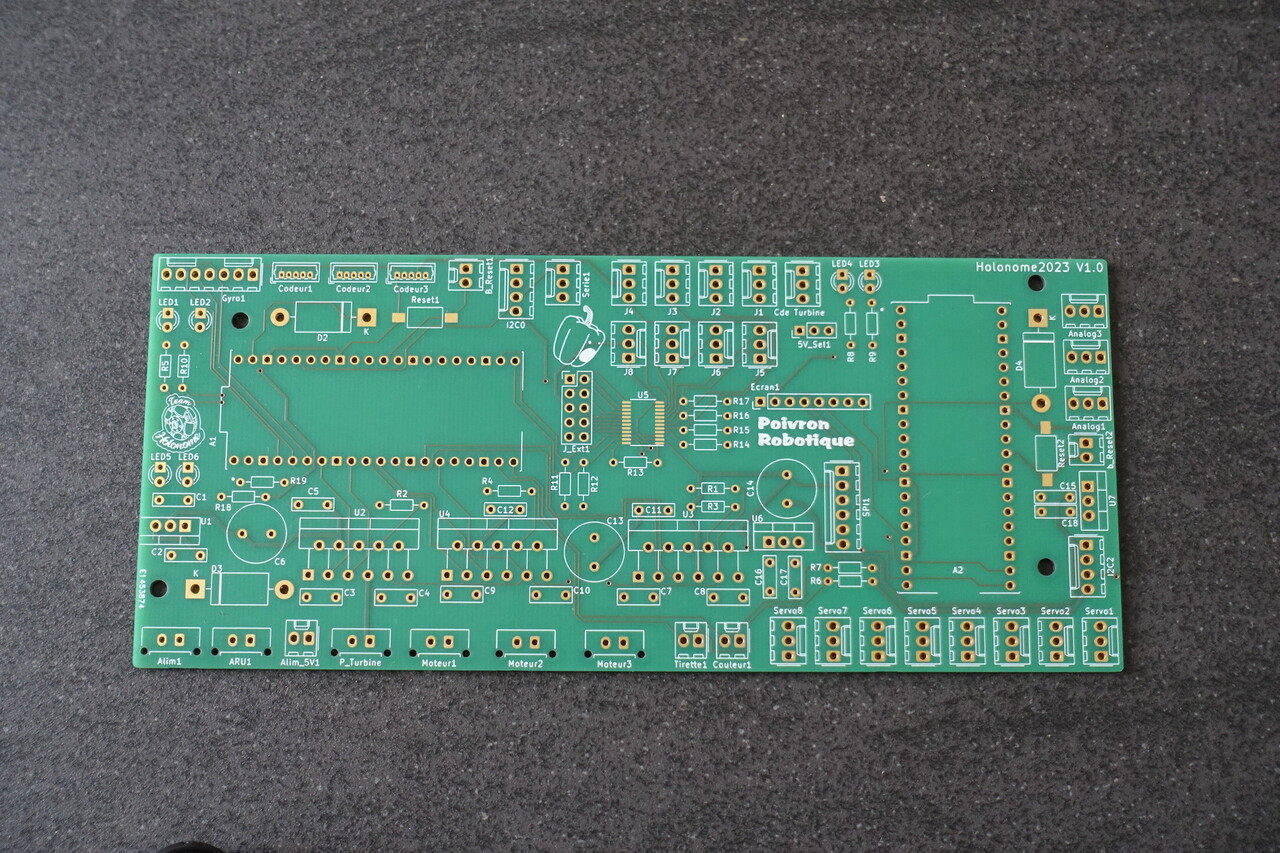
Carte Holonome 2023 nue
On admire la sérigraphie :

Sérigraphie de la carte 2023
Une fois soudée, la carte pourrait ressembler à ceci :

Carte Holonome 2023 - modélisation
Côté mécanique
La base roulante progresse, grâce à notre scie à chantourner. Nous manquons de vis, rondelles et écrous pour l’assembler proprement...
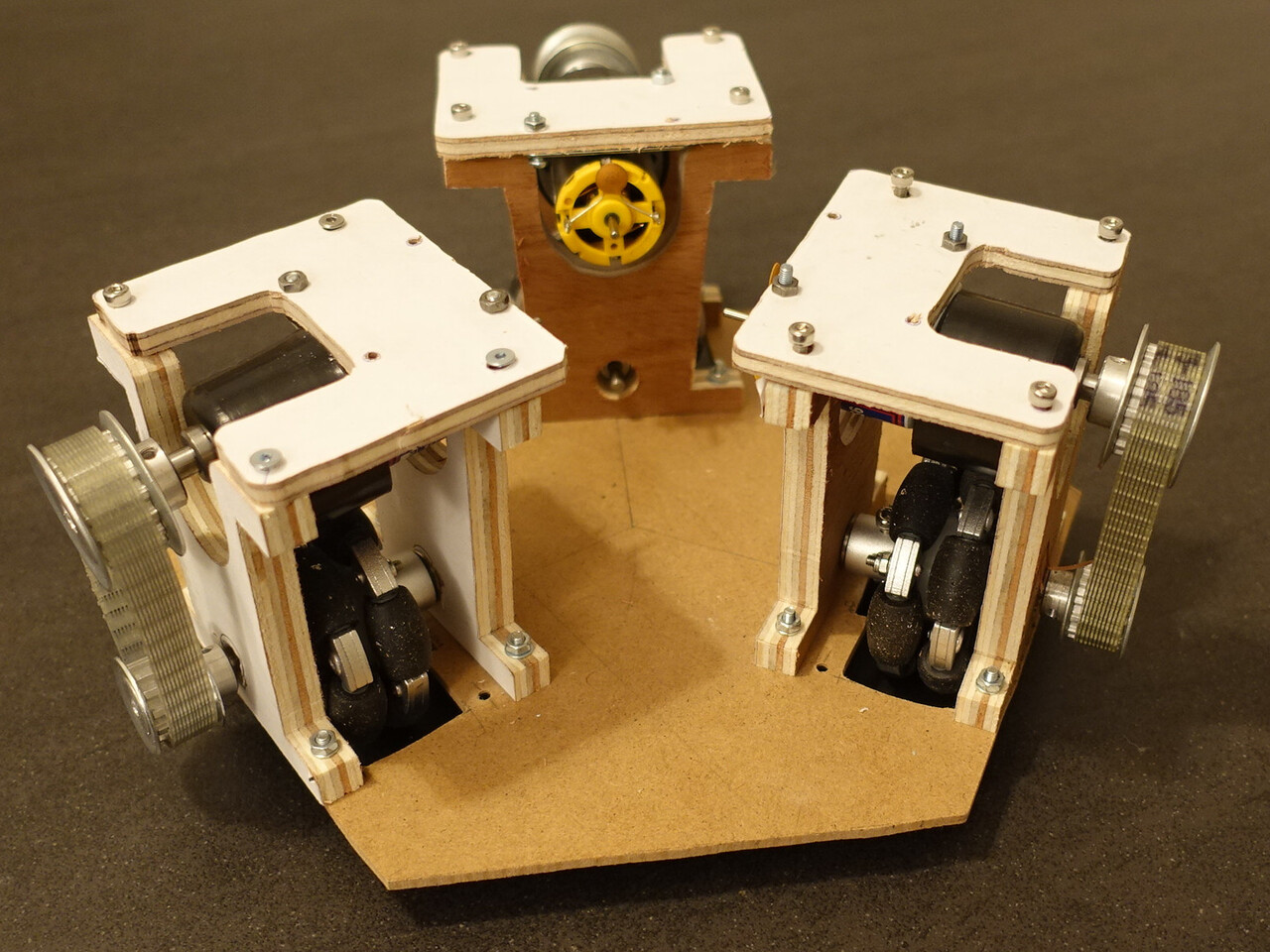
Base roulante holonome
Dommage, non ?

Base roulante holonome
Mots clés : Électronique, Robot holonome, 2023, Raspberry Pi Pico
Règlement 2023 et notre programme
16 septembre 2022
Le brouillon du règlement de la coupe est disponible, sur le site de la coupe de France de robotique. Cela fait donc une semaine que nous réfléchissons activement au règlement.
C’est un règlement à l’opposée de celui de l’an dernier, avec une table presque sans obstacle qui incite à avoir des robots qui se déplace bien, voire très bien sur le terrain !
Alors, en attendant la version finale du règlement - la FAQ peut vous indiquer dans quel sens évolue le règlement - nous ébauchons nos robots.
Cette année nous sommes très tentés d’avoir deux robots. Le premier sera basé sur notre architecture de 2014 et sera chargé de marquer les points avec les gâteaux. Le second robot sera bien différent du premier et s’occupera des cerises. Voici ce que nous avons en tête avec les principales étapes du projet.
Robot des gâteaux
Basé sur le robot historique, nous réutiliserons les roues, les moteurs, le gyroscope et notre magnifique carte électronique maison. Il embarquera les 10 cerises du départ, devra pousser et tirer les gâteaux dans les assiettes et leur déposer une cerise dessus. Voici notre programme (pas forcément dans l’ordre) :
- Programmation : gérer les accélérations et décélération au niveau des trajectoires
- Programmation : Arrêt de l’asservissement en cas d’erreur trop grande
- Mécanique : actionneur pour prendre une cerise du réservoir du robot et la déposer sur un gâteau
- Mécanique : refaire le châssis, diminuer le périmètre non-déployé
- Programmation - optionnel : Gérer la stratégie haut niveau avec le Raspberry Pi
Robot des cerises
Nous partons de zéro pour ce robot. Pour la localisation, nous tentons de rester sur l’architecture qui nous a si bien réussi : des codeurs sur les moteurs. Pour le reste, l’objectif est de changer un peu des technologies utilisées depuis 2014 sur nos robots. Ce sera donc un robot holonome, d’un diamètre modeste (nous visons 25cm). Le cœur de l’électronique sera un Raspberry Pi Pico et pour le pilotage des moteurs, nous hésitons entre des LMD18200 ou des modules de type Pololu. Sur ce robot, notre programme est très chargé :
- Mécanique : base roulante holonome
- Mécanique : intégration de l’électronique
- Mécanique : intégration de la batterie
- Électronique : prototypage sur plaque de test pour valider les capteurs/actionneurs
- Électronique : conception de la carte
- Programmation : lecture du gyroscope à partir du RPI Pico
- Programmation : lecture des capteurs de couleur à partir du RPI Pico
- Programmation : lecture des codeurs à partir du RPI Pico
- Programmation : portage du code des servomoteurs (ou utilisation des PWM ?)
- Programmation : portage des codes de déplacement sur RPI Pico (asservissement, construction des trajectoires, accélération et décélération, arrêt sur erreur trop grande)
- Divers : système de préhension et de dépose des cerises
- Divers : système d’évitement.
En gros
Un programme bien (trop ?) chargé. Alors nous essayons de ne pas trop traîner, nous avançons bien côté shopping. Nous espérons avoir fini de commander les composants nécessaire à la nouvelle roulante ce week-end. Ensuite, nous nous focaliserons sur le RPI Pico...
Mots clés : Conception, Coupe, Odométrie, Robot holonome, 2023
Analyse cinematique d’un robot holonome
4 septembre 2022
Toujours pas de maquette d’un robot holonome en vue (même si nous avons retrouvé nos pièces), mais voici la présentation de la cinématique d’un robot holonome. Le raisonnement a été le suivant :
Nous pouvons connaître la rotation de nos moteurs, donc la composante selon un axe de la vitesse des roues. Pouvions-nous, à partir de ces vitesses déterminer la vitesse du robot ? C’est notre premier article.
Puisque c’est possible, exprimons ces vitesses. c’est le sujet du deuxième article.
Maintenant que nous pouvons connaître le déplacement du robot à partir des vitesses des roues, pouvions-nous faire l’inverse ? Trouver comment commander les trois moteurs en fonction d’un mouvement souhaité ? C’est notre 3ᵉ article !
Le tout est rangé dans "Nos études", bonne lecture !
Mots clés : Mécanique, Robot holonome, 2023
page précédente 1 ... 6 7 8 9 10 11 12 13 14 ... 37 page suivante
Administration du site