Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !

Dernières nouvelles
Match 1 - Coupe de France 2022
30 mai 2022
Au tirage, nous apprenons que nous allons affronter le "robot-en-carton". Et là, nous sommes triplement pas content :
- Le robot en carton n’est pas en carton !
- Nous avons déjà fait un match contre le robot en carton à la pré-coupe Auvergne Rhône-Alpes (la CARAR pour les intimes)
- Nous savons que le robot en carton peut nous battre. Alors OK pour perdre, mais pas contre le robot en carton !
Nous trouvons surtout dommage de ne pas affronter une équipe, mais tant pis !
Début du match, le robot sort de sa zone départ. sa trajectoire semble nominale, nous sommes confiants.
Première action, premier échec : le robot n’arrive pas à attraper la statuette.
Il arrive faire tomber le premier échantillon mais pas le second. C’est un nouveau problème auquel nous n’avions pas été confronté, ni à la maison, ni à la CARAR, ni sur la table d’homologation... La peinture de la table est rugueuse et retient fortement les échantillons...
Puis vient la dépose de la statuette, le robot semble la déposer parfaitement, mais comme elle ne glisse pas sur la table, elle se cabre et retombe avec 2 millimètres en dehors du socle de dépose.
Pour les carrés de fouille, le résultat est bien plus positif. C’est l’action la moins au point et pourtant le robot lit parfaitement les résistances et bascule les 3 premiers carrés de fouille à la perfection. Malheureusement, dans l’aller-retour le robot s’est décalé et il lui manque deux centimètre pour basculer le dernier carré de fouille. C’est l’action qui nous satisfait le plus sur ce match.
Le match se termine après que le robot soit allé vers la vitrine (mais sans sa statuette) puis retourné à sa zone de départ.
Le robot indique un nombre de point bien au-dessus du score réel : 96 points affichés pour 56 points réellement marqués. Ceci nous permet quand même d’être classé 13e.
La vidéo est disponible en 720p ici (mp4 - 25 Mo).
Mots clés : Coupe, Vidéo, Eurobot 2022, Match
Coupe de France 2022
30 mai 2022
Mais quelle coupe !
7 ans après nous revenons loin d’être déçus ! Impressionnés par l’ambiance, cette ambiance qui fait le charme de cette compétition. Des dizaines et des dizaines d’équipes qui vont "s’affronter" sur les tables mais qui sont prêtes à s’entraider jusqu’à la dernière seconde avant le match. C’est comme dans nos souvenirs mais en mieux.
Les stands étaient deux fois plus grands qu’à la Ferté-Bernard, pas d’équipes sous un barnum où il gèle la nuit et où on cuit la journée. Bref, que du bonheur...
Alors, merci ! Merci aux bénévoles, à Planète Sciences, aux partenaires, que ce soit la ville de la Roche-Sur-Yon, la région, les entreprises ou le mélange des deux (Oryon). Merci aux autres équipes, à toutes celles avec qui nous avons pu discuter et à toutes celles avec lesquelles nous n’avons pas eu le temps de discuter...
Alors, ces résultats ?
Globalement, nous sommes très contents de notre performance. Au fil des séries, nous nous sommes hissés à la 10e place que nous avons su conserver au classement général. Nous avons largement dépassé notre objectif - que nous pensions tendu - d’être dans les 16 premiers.
Cerise sur le gâteau, nous avons obtenu le prix de l’éco-conception, qui nous a été remis par Capgemini !
Et maintenant ?
Maintenant, nous remettons nos idées à plat, nous allons certainement continuer d’alimenter le site avec :
- Le détail de nos matchs
- Un mot sur l’éco-conception
- La présentation du robot, dans sa forme finale
- Et peut-être même plus...
Mots clés : Coupe, Eurobot 2022
Dernière ligne droite pour Eurobot 2022 (France)
22 mai 2022
À J-3 des homologations, les journées ont été chargées.
La lecture des résistances carrés de fouille a été ajoutée à la stratégie générale. Nous avons un algorithme assez sympa dont nous sommes fiers. Le robot arrête de s’acharner sur les carrés de fouilles quand il lui reste juste assez de temps pour aller déposer la statuette (et rentrer à la case départ).
Une partie du dimanche a été consacrée à l’évitement de l’adversaire. Après analyse, nous avions 2 à 3 trajectoires sur lesquelles rencontrer un adversaire était très probable. Le but étant de ne pas bloquer le robot et perdre la majorité de nos points à cause d’un robot adverse planté. Pour ces trajectoires nous avons défini des solutions de replis qui se déclenchent en fonction du temps restant.
En voulant valider cette stratégie, nous découvrons la piètre fiabilité de notre détection. Surpris car nous utilisions un système similaire à celui des années précédentes, nous avions désactivé une fonction de maintient de la présence de l’obstacle. Nous considérons maintenant que la voie est libre si les capteurs annoncent 5 valeurs consécutives sans obstacles et les résultats sont flagrants !
Mise à jour de notre Todo List :
-
Détection des résistances :-
Conception et réalisation mécanique -
Adaptation du câblage -
Code du module -
Intégration dans la stratégie
-
-
Stratégie alternative en cas de robot bloqué - Contrôler et adapter la position du robot lors de la dépose de la réplique, pour garantir qu’elle soit à 100% sur le socle à chaque fois.
- Faire les bagages !
Concernant la dépose de la réplique, nous ne faisons pas entièrement confiance à notre table de test et nous nous préparons à ajuster une trajectoire en fonction des résultats sur les tables officielles.
Mots clés : Coupe, Essais, Eurobot 2022
Mesure des résistances et avancement général
17 mai 2022
Nous sommes le 17 mai 2022 qui se situe exactement en "J-pas beaucoup" et "J-pas assez".
Mise à jour de notre Todo List :
-
Affichage du score-
Fixer l’écran, le Raspberry Pi et le nouveau bouton On/Off
-
-
Réaliser la cale pour positionner le robot en début de match -
Panneau de 70x100 mm à installer sur le robot - Détection des résistances :
-
Conception et réalisation mécanique -
Adaptation du câblage -
Code du module - Intégration dans la stratégie
-
- Stratégie alternative en cas de robot bloqué
- Contrôler et adapter la position du robot lors de la dépose de la réplique, pour garantir qu’elle soit à 100% sur le socle à chaque fois.
Senseur pour résistance
La zone où mesurer la résistance n’est pas très grande, elle se situe sur un plan incliné et comme nous souhaitons être robuste aux variations de positionnement de notre robot, ceci nous pose des soucis.
Nous avons conçus une mécanique pas si simple, mais qui ne nécessite qu’une seul actionneur. Les essais montrerons que nous manquions d’un degré de liberté, ce qui nous amènera à installer un système à ressorts en plus de l’élastique. Voici l’idée, sur l’image ci-dessous, seul le bras bleu est actionné par le servomoteur :
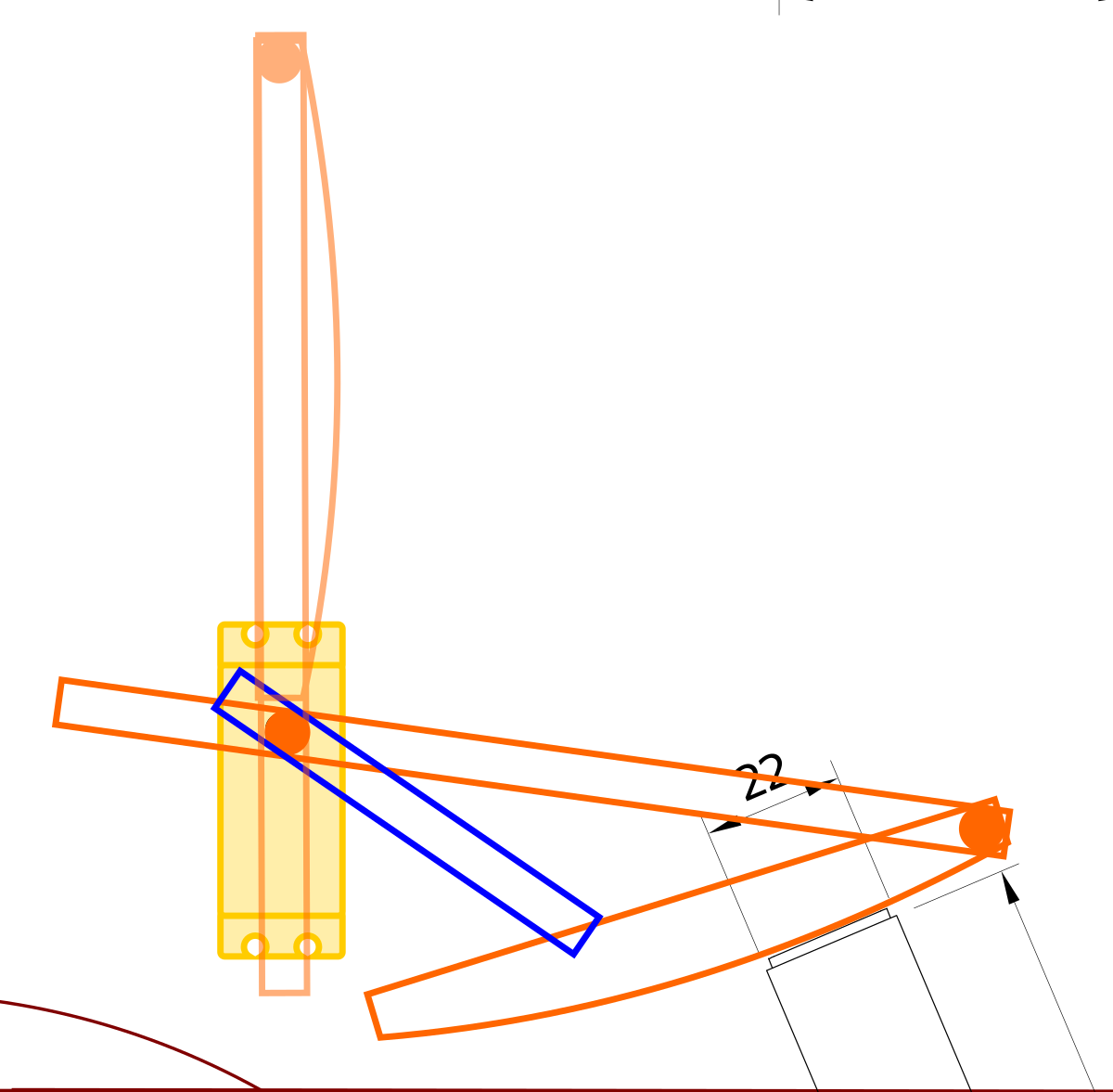
Principe du "Senseur R"
Tout commence avec un profilé qui ressemble à une nervure d’aile d’avion : il nous faut une belle courbe :

Comme une aile d’avion
Ensuite nous montons ceci sur un mat, avec un axe et nous rajoutons le contact électrique. Ne trouvez-vous pas que ce fils de cuivre a un certain charme sur le bois ?

Le cuivre et le bois
Ce qui, une fois fini et câblé ressemble à ceci :
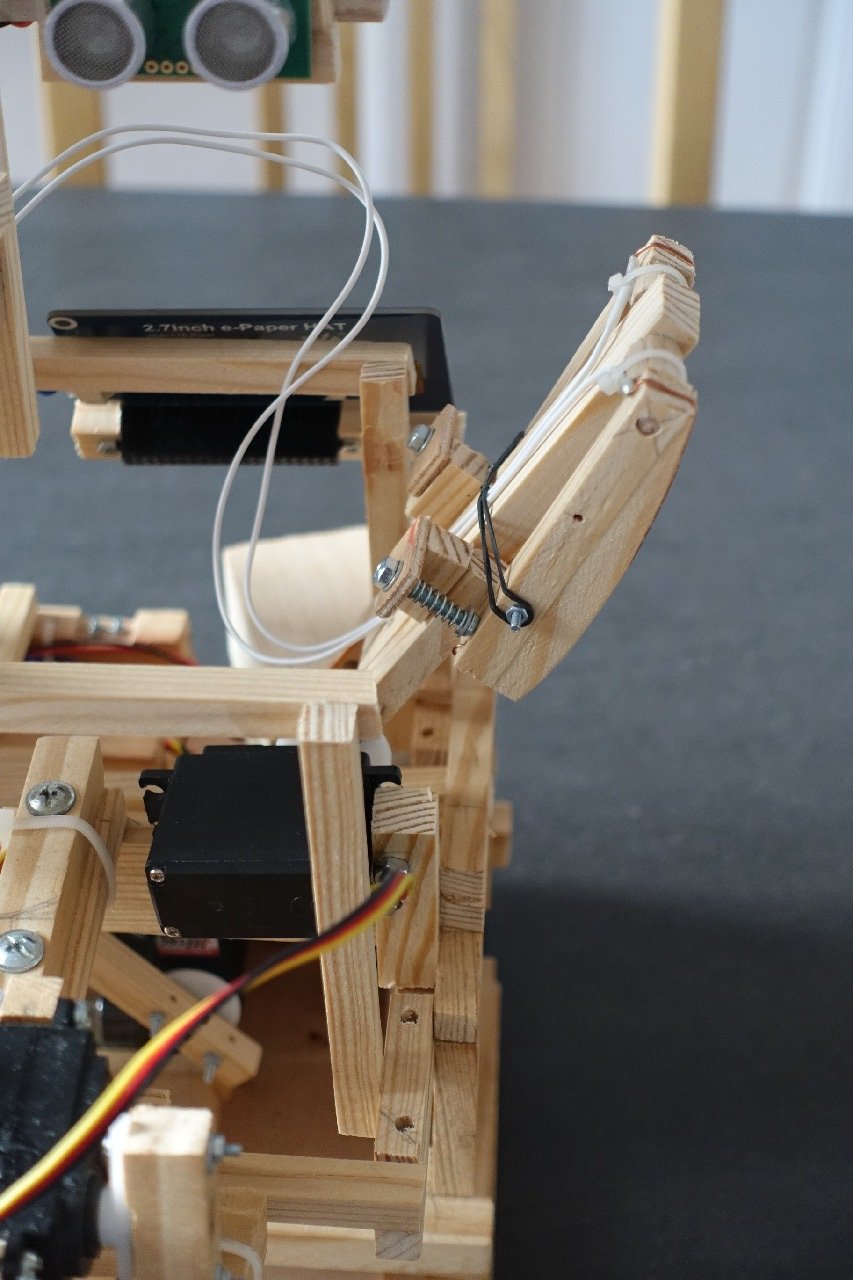
Senseur R monté
Nous pourrions dire qu’afin d’avoir le système le plus robuste possible, nous avons un élément de test le plus moche possible, mais ce ne serait pas 100% exact.

Élément de test - carré de fouille
Et pour conclure, une courte vidéo du système en action :
La vidéo est disponible en 720p ici (mp4 - 5,6 Mo).
Mots clés : Conception, Coupe, Essais, Vidéo, Eurobot 2022, Photo
Affichage des points et mât balise
2 mai 2022
Voilà, nous sommes début mai et nous comptons les semaines qui restent avant la coupe de France de Robotique sur les doigts d’une seule main.
Notre todo-list se rétrécit et devient de plus en plus précise :
-
Construction du ma balise - Affichage du score
-
Afficher un logo au démarrage du robot -
Afficher l'état des capteurs (et la "couleur" de départ du robot) avant le début du match -
Afficher le score pendant et en fin de match - Fixer l’écran, le Raspberry Pi et le nouveau bouton On/Off
-