Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !
Dernières nouvelles
Essais dynamiques
25 janvier 2023
Voici nos essais qui datent de début janvier, avant que nous installions proprement la carte électronique. Ce qui est fonctionnel :
- L’asservissement des roues en vitesse grâce au retour des codeurs ;
- L’asservissement en position du robot grâce au retour des codeurs et du gyroscope ;
- Le suivi d’une trajectoire avec des profiles de vitesse suivant une accélération.
La première vidéo nous a permis de mesurer les effets de l’accélération sur l’erreur de position.
Voici nos résultats :
- 6 aller-retours de 70 cm à 0,5 m/s² en 32 s, dérive : 2,0 cm
- 6 aller-retours de 70 cm à 1,0 m/s² en 38 s, dérive : 5,5 cm
- 4 aller-retours de 70 cm à 1,5 m/s en 15 s (soit 27s pour 6 aller-retours), dérive : 9,0 cm
Ce qui nous incite à privilégier les accélérations lente en début de match et tenter une trajectoire vraiment rapide en fin de match si nécessaire.
Aller-retours avec accélération contrôlée (720p - 12,3 Mo).
La petite oscillation en fin de mouvement est certainement due à une courroie détendue.
Mais là, ce ne sont que des aller-retours. Or, un robot holonome, ça permet de faire des trajectoires plutôt cool, comme une translation circulaire, que voici :
Trajectroire circulaire avec accélération contrôlée (720p - 3,3 Mo).
Mots clés : Essais, Vidéo, Robot holonome, 2023
Avancées logicielles - Le déplacement avance !
11 décembre 2022
Par rapport à nos nouvelles du 2 décembre 2022, nous avons bien avancé sur la programmation des déplacements ! À ce niveau, le dernier point encore non maîtrisé est l’utilisation du gyroscope pour se positionner.
Nous avons publié notre code sur Github avec un Readme qui explique la structure du code.
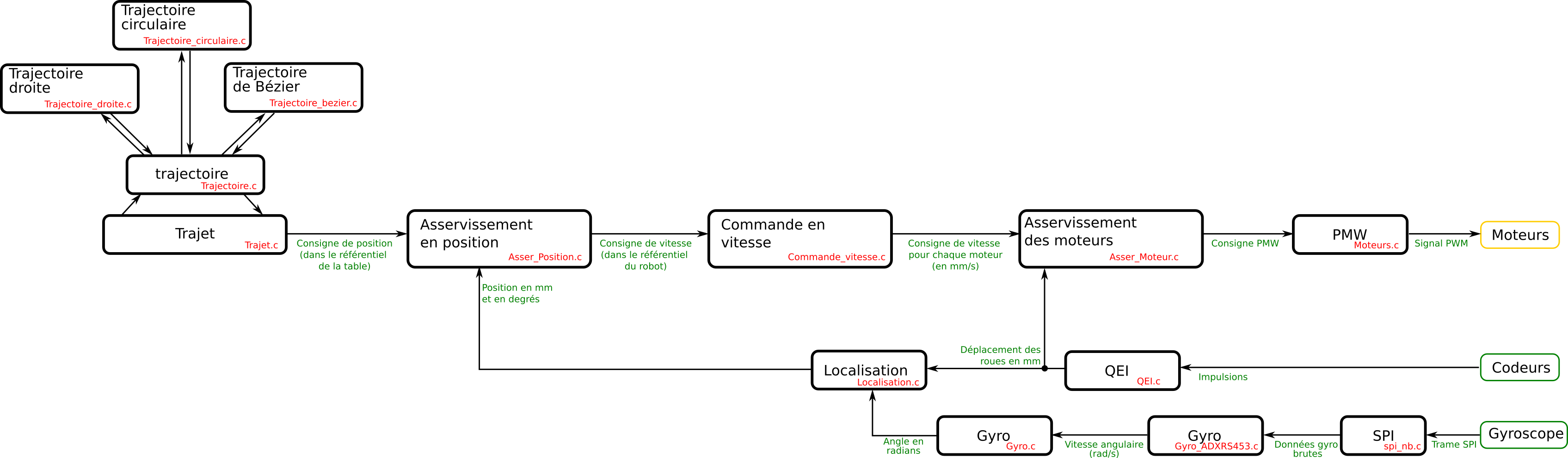
Architecture logicielle des déplacements
Pour l’instant, nous n’avons pas de belle vidéo à présenter, mais ça ne saurait tarder... Pour patienter, un test "en boucle ouverte", seuls les moteurs sont asservis en vitesse, il n’y a pas de retour sur la position du robot !
Et voici les courbes obtenues lors des essais de contrôle en vitesse avec une accélération et une décélération - ce sont bien des courbes expérimentales :
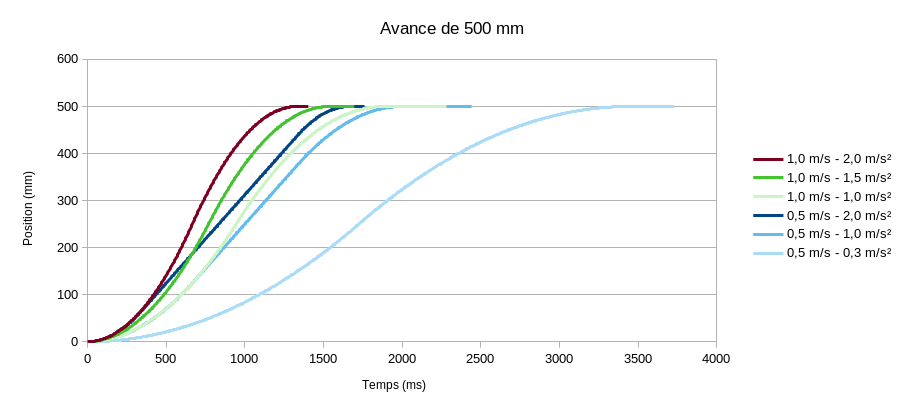
Le code supporte les trajectoires droites, circulaires ou suivant les courbes de Bézier.
Donc nous sommes - presque - prêts à nous déplacer avec classe et précision !
Mots clés : Programmation, Vidéo, Robot holonome, 2023, Raspberry Pi Pico
Match 5 - Coupe de France 2022
13 juin 2022
La préparation
Nous voulons jouer prudents, et ne pas nous retrouver bloqués dans la même situation qu’au match précédent.
Nous collons une bande de papier sur notre mât balise pour éviter d’être invisible pour un autre robot.
Nous allons rajouter une trajectoire pour s’échapper d’un cas similaire et surtout indiquer à notre robot de ne pas s’acharner. S’il rencontre un robot face à lui sur le chemin vers les carrés de fouilles, il n’insiste plus, il va déposer la statuette.
L’autre point vient des carrés de fouille eux même. Notre précision est parfois trop mauvaise et nous voulons y remédier. Nous ajoutons deux capteurs de proximité (un seul servira) pour détecter le premier carré de fouille. c’est une modification notable et pour ne pas prendre de risque nous la testons bien. Même, nous ne l’utilisons que du côté jaune pour simplifier les tests.
Et puis, nous travaillons enfin sur ces échantillons que nous n’arrivions pas à attraper. Au lieu d’utiliser la chambre à air, nous utilisons des élastiques pour assurer une bonne adhérence entre notre robot et les échantillons.
Le match
Nous tombons jaune et allons pouvoir tester notre nouveau code en conditions réelles !
Le robot attrape la statuette, attrape les deux échantillons et dépose la statuette. Celle-ci ne bascule pas mais se retrouve quand même bien positionnée dans la zone de dépose.
Le code pour détecter les carrés de fouille s’active et le robot semble bien se comporter, même si la lecture du carré de fouille semble échouer.
Vient ensuite la rencontre du robot adverse. Nous l’apprendrons après le match, leur robot s’est décalé, il a détecté un échantillon mal tombé comme la bordure. Le robot vient donc bien loin dans notre zone et nous entendons un petit choc. Le robot adverse pousse notre carré avec une croix rouge...
Mais après ce choc, les deux robots se suivent et remplissent leurs missions en s’évitant honorablement !
Et à 1"48, le robot par vers la zone de dépose de la statuette et vous nous entendez dire "Oh non, oh non, oh non !". Le robot embarque avec lui un échantillons qui va se bloquer entre lui et la zone de dépose. Il arrivera à activer la vitrine, mais la dépose de la statuette ne nous rapportera pas de point : elle dépasse de la vitrine !
Pour plus de détails, regardez l’échantillon vert sur la vidéo, comment, sournoisement, étape par étape, il se déplace pour nous bloquer !
Le robot affiche le score qu’il pense avoir fait, soit 86 points alors qu’il n’en a marqué que 71.
Ce qui nous rapporte 79 points pour ce match et nous maintient 10e !
La vidéo est disponible en 720p ici (mp4 - 25 Mo).
Mots clés : Coupe, Vidéo, Eurobot 2022, Match
Match 4 - Coupe de France 2022
11 juin 2022
La préparation
Avant le match, voici le topo, nous sommes 10e au classement général, avec 100 points d’avance sur le 16e. Nous avons eu une nuit et la matinée pour ne rien faire sur le robot et s’assurer qu’il reproduise l’un des deux derniers matchs.
L’idée étant de gagner encore quelques points sur le 16e pour nous garantir que même avec un match 5 raté, nous garantissions notre 16e place.
Ça, c’était le plan.
Le match
Nous rencontrons Evolutek et nos robots, eux aussi, vont se rencontrer.
Tout d’abord, la prise de la statuette, la dépose de la réplique se passent bien. Nous avons toujours un soucis avec les échantillons mais nous n’avons toujours rien fait pour corriger ça...
Dans notre trajectoire d’approche des carrés de fouille, nous détectons le robot adverse. Notre robot s’arrête puis recule pour le laisser passer. C’est une trajectoire compliquée car elle tourne beaucoup, laissant des angles morts dans notre détection de l’adversaire.
Le robot adverse continue d’avancer sur les carrés de fouille et s’arrête pour détecter une résistance. Notre robot retente de suivre sa trajectoire, s’approche du robot adverse sans le détecter. Sa rotation est bloquée mais il peut avancer et va même se planter dans le mur.
A ce moment, la situation n’est pas brillante.
Seulement, lorsque le robot suit une trajectoire, la consigne de notre robot n’est asservie que sur 180° (+90°/-90°), ceci nous permettant d’avoir le même code pour suivre une trajectoire en avançant ou en reculant. L’erreur dépasse les 90° et le robot choisissant le plus petit angle pour s’aligner va se retourner de 180°.
Et là, c’est perdu !
L’évitement regarde derrière quand il avance et devant quand il recule. Le robot aurait retrouvé son orientation correcte au premier test d’un carré de fouille, car notre code lui demande à ce moment une orientation particulière (qui elle ne se limite pas à +90°/-90°). Mais avec les robots adverses à proximité, nous préférons limiter les dégâts et demandons à l’arbitre d’arrêter notre robot.
C’est là que le robot adverse pousse notre robot sur 50 cm. A posteriori, nous avions une ouverture de 2 cm dans notre mât balise pile au niveau de leur lidar. Ça pourrait expliquer qu’ils n’aient pas vu notre robot.
Malgré tout, nous avons eu un peu de chance. Evolutek a basculé nos carrés de fouille ce qui compense les points non-marqués par notre robot au niveau des échantillons. Notre prédiction de score se trouve alors plutôt juste : 33 points sur le terrain pour 29 points estimés, soit un score de 39 points qui à notre grande surprise nous maintient 10e.
La vidéo est disponible en 720p ici (mp4 - 17 Mo).
Mots clés : Coupe, Vidéo, Eurobot 2022, Match
Match 3 - Coupe de France 2022
9 juin 2022
La préparation
Les séries de matchs s’enchaînent et nous savons que nous n’avons pas beaucoup de temps avant la prochaine série.
Notre attention se porte sur la dépose de la réplique. C’est 10 points que nous devrions marquer à chaque match et pour l’instant, nous ne les avons pas eu ! Soit le servomoteur est "timide" et la réplique peut dépasser du coté du terrain, soit le servomoteur est plus entreprenant et la statuette peut basculer (et se retrouver trop loin). Nous prenons le parti d’accepter ce basculement potentiel mais nous modifions légèrement le robot pour que si la basculement survient, il survienne plus près du robot et donc avoir une réplique encore dans la zone de dépose après basculement.
Le match
Le robot attrape la statuette, n’attrape qu’un échantillon sur les deux (mais nous n’avions toujours rien fait pour corriger le problème), et dépose la statuette. Celle-ci ne bascule pas mais se retrouve quand même bien positionnée dans la zone de dépose. Le robot a du mal à détecter les carrés de fouilles, il rate notamment le 2e mais en pousse 2 autres. Il dépose la statuette sur la vitrine, qui s’allume, et rentre à la zone de départ.
Le robot affiche le score qu’il pense avoir fait, soit 91 points
Le robot marque donc 81 points et affiche une prédiction à 91. Ce qui nous rapporte 97 points pour ce match et nous classe 10e !
La vidéo est disponible en 720p ici (mp4 - 25 Mo).
Mots clés : Coupe, Vidéo, Eurobot 2022, Match
Administration du site