Avancées logicielles - Le déplacement avance !
11 décembre 2022
Par rapport à nos nouvelles du 2 décembre 2022, nous avons bien avancé sur la programmation des déplacements ! À ce niveau, le dernier point encore non maîtrisé est l’utilisation du gyroscope pour se positionner.
Nous avons publié notre code sur Github avec un Readme qui explique la structure du code.
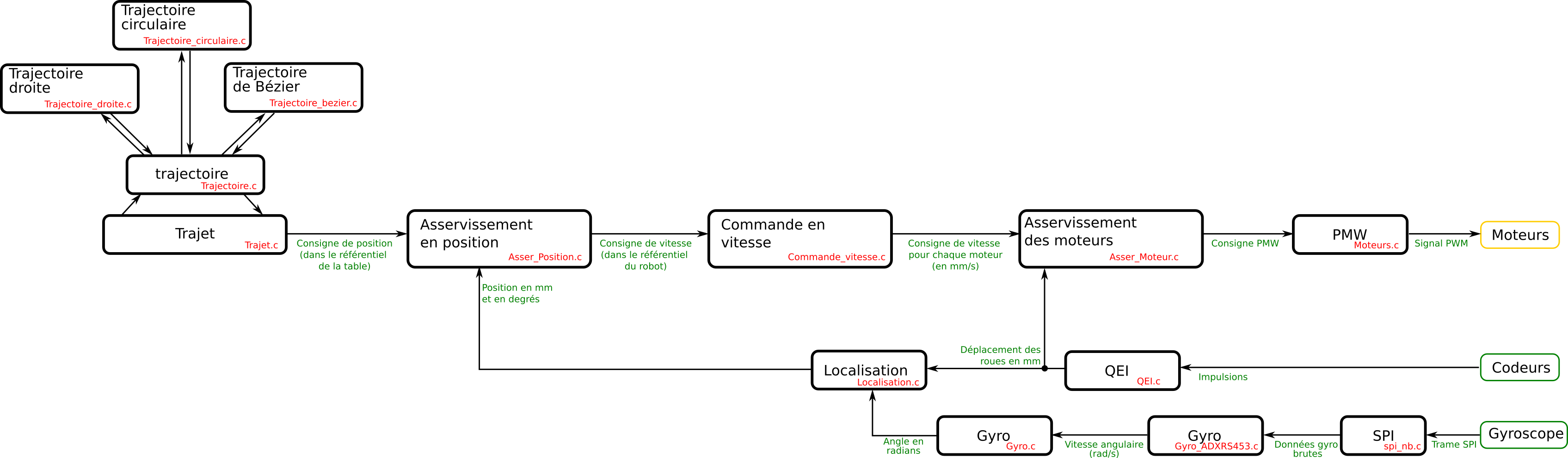
Architecture logicielle des déplacements
Pour l’instant, nous n’avons pas de belle vidéo à présenter, mais ça ne saurait tarder... Pour patienter, un test "en boucle ouverte", seuls les moteurs sont asservis en vitesse, il n’y a pas de retour sur la position du robot !
Et voici les courbes obtenues lors des essais de contrôle en vitesse avec une accélération et une décélération - ce sont bien des courbes expérimentales :
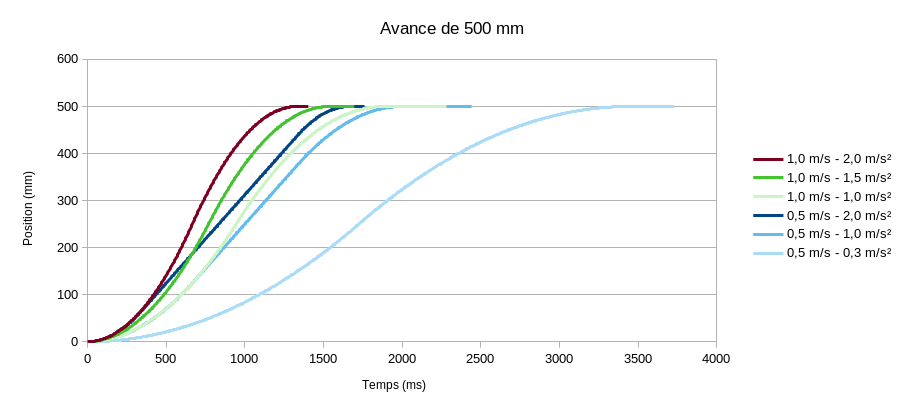
Le code supporte les trajectoires droites, circulaires ou suivant les courbes de Bézier.
Donc nous sommes - presque - prêts à nous déplacer avec classe et précision !
Commentaires
Il n'y a pas de commentairesAjouter un commentaire
Administration du site