Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !
Dernières nouvelles
Match 2 - Coupe de France 2022
7 juin 2022
La préparation
Notre premier match est un peu vécu comme un échec ! Nos actions censées être les plus fiables ont échouées...
Nous sommes jeudi, en milieu de matinée. Deux autres matchs nous attentent dans l’après midi. À la fin du match, nous avons au moins 2h30 pour améliorer le robot. Et nous allons en profiter !
Nous commençons par la statuette, qui a elle seule nous a fait perdre 20 points au match précédent. Nous regardons la vidéo du match encore et encore pour comprendre ce qui s’est passé, jusqu’à regarder l’action image par image (touche "E" sur VLC). Notre action reposait sur le fait que le robot puisse pousser délicatement la statuette pour qu’elle s’aligne avec le robot avant de la prendre. Sur la vidéo, nous avons l’impression que la statuette était accrochée au terrain et qu’elle a été poussée d’un coup ! La zone de l’abri de chantier semble créer beaucoup plus de frottement que toutes celles que nous avons pu essayer.
En jouant avec la statuette nous remarquons que celle-ci fait un petit bruit quand nous la soulevons de la table. Nous trouvons une mini boulette de "pâte à fix" sous la statuette ! Voici qui peut expliquer des choses !
Mais ça ne nous suffit pas, nous voulons fiabiliser encore cette action et être capable de soulever la statuette sans la déplacer. Une partie de la matinée sera donc consacrée à la redécouper !
Concernant la dépose de la réplique, nous décidons de la pousser plus loin avec le servomoteur.
Le match
L’un de nos meilleurs matchs. Le robot attrape la statuette, n’attrape qu’un échantillon sur les deux (mais nous n’avions rien fait pour corriger le problème), et dépose la statuette. Celle-ci bascule et dépasse de la zone de dépose de 2 mm de l’autre côté. Si le robot a du mal à détecter les carrés de fouilles, il pousse tous ceux qu’il peut pousser sans risque et sans trop se décaler. Il dépose la statuette sur la vitrine, qui s’allume, et rentre à la zone de départ.
Pour une raison pas vraiment déterminée, le robot affiche son score sans compter les 20 derniers points, ce qui compense très bien les points perdus à cause de la réplique et de l’échantillon !
Le robot marque donc 75 points et affiche une prédiction à 71. Ce qui nous rapporte 95 points pour ce match et nous classe 12e !
La vidéo est disponible en 720p ici (mp4 - 25 Mo).
Mots clés : Coupe, Vidéo, Eurobot 2022, Match
Match 1 - Coupe de France 2022
30 mai 2022
Au tirage, nous apprenons que nous allons affronter le "robot-en-carton". Et là, nous sommes triplement pas content :
- Le robot en carton n’est pas en carton !
- Nous avons déjà fait un match contre le robot en carton à la pré-coupe Auvergne Rhône-Alpes (la CARAR pour les intimes)
- Nous savons que le robot en carton peut nous battre. Alors OK pour perdre, mais pas contre le robot en carton !
Nous trouvons surtout dommage de ne pas affronter une équipe, mais tant pis !
Début du match, le robot sort de sa zone départ. sa trajectoire semble nominale, nous sommes confiants.
Première action, premier échec : le robot n’arrive pas à attraper la statuette.
Il arrive faire tomber le premier échantillon mais pas le second. C’est un nouveau problème auquel nous n’avions pas été confronté, ni à la maison, ni à la CARAR, ni sur la table d’homologation... La peinture de la table est rugueuse et retient fortement les échantillons...
Puis vient la dépose de la statuette, le robot semble la déposer parfaitement, mais comme elle ne glisse pas sur la table, elle se cabre et retombe avec 2 millimètres en dehors du socle de dépose.
Pour les carrés de fouille, le résultat est bien plus positif. C’est l’action la moins au point et pourtant le robot lit parfaitement les résistances et bascule les 3 premiers carrés de fouille à la perfection. Malheureusement, dans l’aller-retour le robot s’est décalé et il lui manque deux centimètre pour basculer le dernier carré de fouille. C’est l’action qui nous satisfait le plus sur ce match.
Le match se termine après que le robot soit allé vers la vitrine (mais sans sa statuette) puis retourné à sa zone de départ.
Le robot indique un nombre de point bien au-dessus du score réel : 96 points affichés pour 56 points réellement marqués. Ceci nous permet quand même d’être classé 13e.
La vidéo est disponible en 720p ici (mp4 - 25 Mo).
Mots clés : Coupe, Vidéo, Eurobot 2022, Match
Mesure des résistances et avancement général
17 mai 2022
Nous sommes le 17 mai 2022 qui se situe exactement en "J-pas beaucoup" et "J-pas assez".
Mise à jour de notre Todo List :
-
Affichage du score-
Fixer l’écran, le Raspberry Pi et le nouveau bouton On/Off
-
-
Réaliser la cale pour positionner le robot en début de match -
Panneau de 70x100 mm à installer sur le robot - Détection des résistances :
-
Conception et réalisation mécanique -
Adaptation du câblage -
Code du module - Intégration dans la stratégie
-
- Stratégie alternative en cas de robot bloqué
- Contrôler et adapter la position du robot lors de la dépose de la réplique, pour garantir qu’elle soit à 100% sur le socle à chaque fois.
Senseur pour résistance
La zone où mesurer la résistance n’est pas très grande, elle se situe sur un plan incliné et comme nous souhaitons être robuste aux variations de positionnement de notre robot, ceci nous pose des soucis.
Nous avons conçus une mécanique pas si simple, mais qui ne nécessite qu’une seul actionneur. Les essais montrerons que nous manquions d’un degré de liberté, ce qui nous amènera à installer un système à ressorts en plus de l’élastique. Voici l’idée, sur l’image ci-dessous, seul le bras bleu est actionné par le servomoteur :
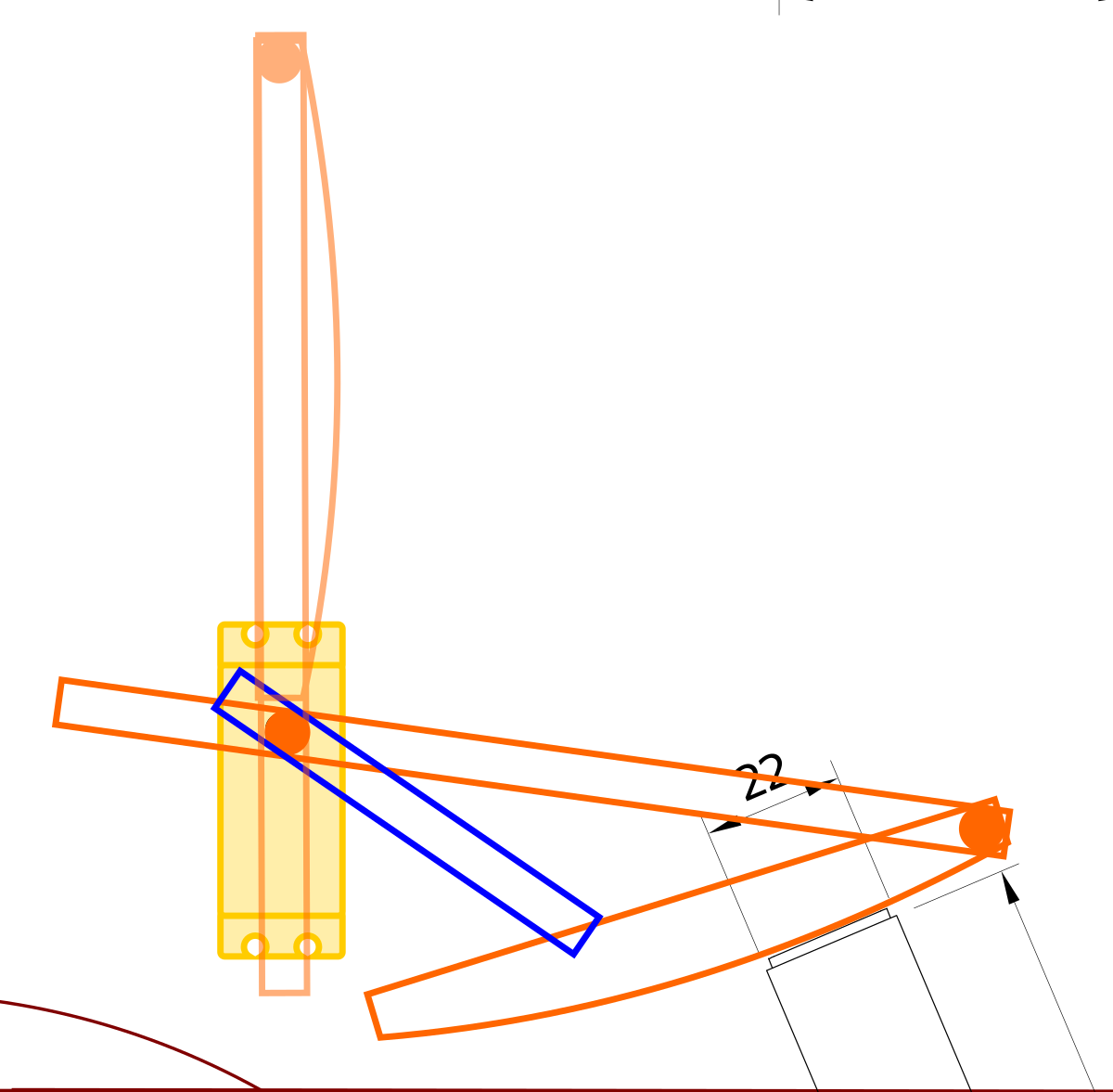
Principe du "Senseur R"
Tout commence avec un profilé qui ressemble à une nervure d’aile d’avion : il nous faut une belle courbe :

Comme une aile d’avion
Ensuite nous montons ceci sur un mat, avec un axe et nous rajoutons le contact électrique. Ne trouvez-vous pas que ce fils de cuivre a un certain charme sur le bois ?

Le cuivre et le bois
Ce qui, une fois fini et câblé ressemble à ceci :
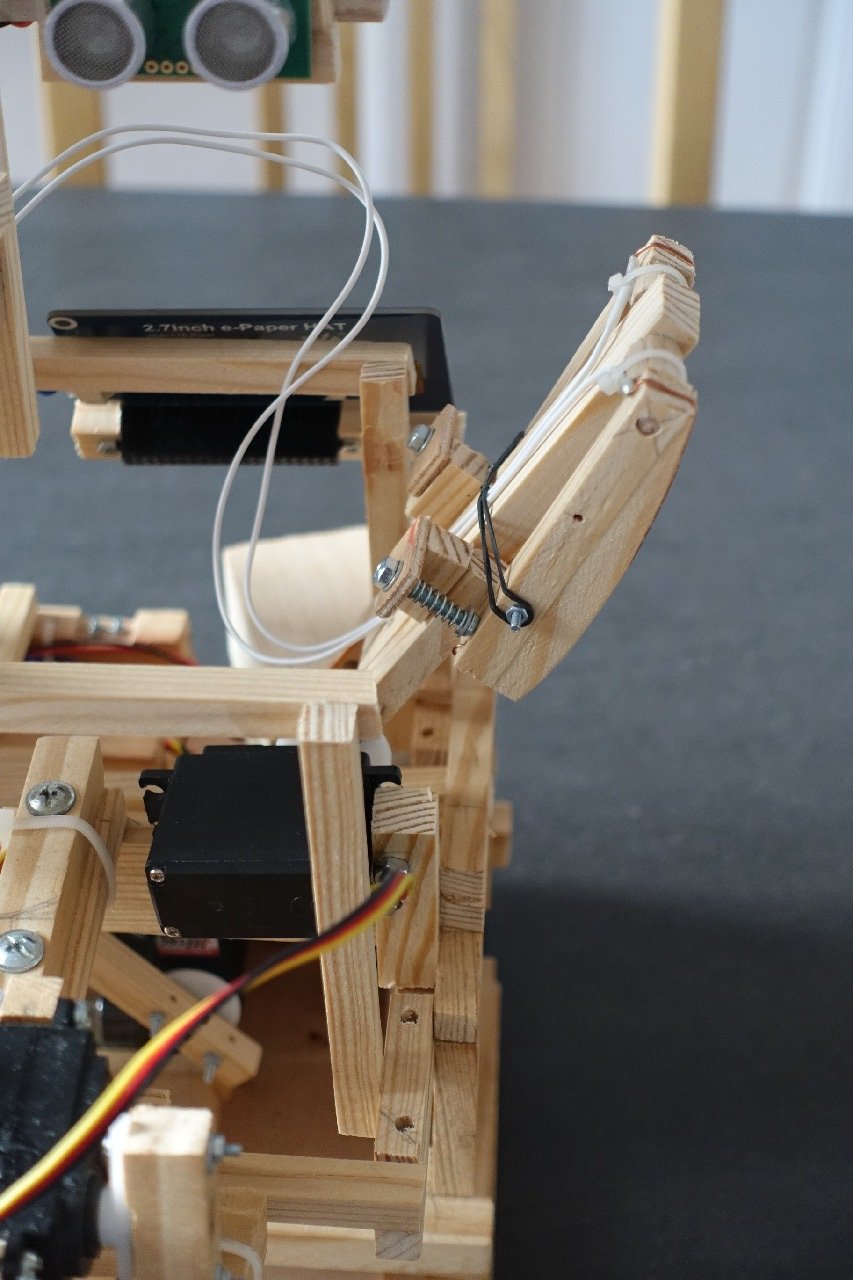
Senseur R monté
Nous pourrions dire qu’afin d’avoir le système le plus robuste possible, nous avons un élément de test le plus moche possible, mais ce ne serait pas 100% exact.

Élément de test - carré de fouille
Et pour conclure, une courte vidéo du système en action :
La vidéo est disponible en 720p ici (mp4 - 5,6 Mo).
Mots clés : Conception, Coupe, Essais, Vidéo, Eurobot 2022, Photo
Pré-coupe CARAR et poster
23 avril 2022
Nous avons participé à la pré-coupe amicale de robotique Auvergne Rhône-Alpes (CARAR), l’occasion de rencontrer d’autres équipes et de passer un bon moment. Merci à Télécom Saint Étienne pour l’organisation !
Pour la CARAR, nous avons sommairement fixé notre écran avec une image fixe dessus. Ceci permettant, dans le meilleur des cas, d’augmenter notre score de 30%.

Affichage des points
Nous avons pu faire 4 matchs, notamment grâce à Arig qui a bien accepté de recommencer notre match. Voici la plus belle vidéo que nous ayons des matchs.
La vidéo est disponible en 720p ici (mp4 - 18 Mo).
Nous comptions 86 points, mais après l’évènement, nous avons relu le règlement et tous nos carrés de fouilles sont invalidés car nous retournons celui avec une croix rouge. Une mise à jour de la stratégie s’est vite imposée.
Le second enseignement nous vient de nos deux matchs contre Arig. Notre robot a détecté un obstacle (un coup l’arbitre, un coup le robot adverse) et n’est pas reparti. Ceci venant d’un bug maintenant corrigé.
Enfin, c’est le moment de réaliser le poster. L’occasion de baptiser le robot, ce sera "Capsicum", le robot qui garde le cap !
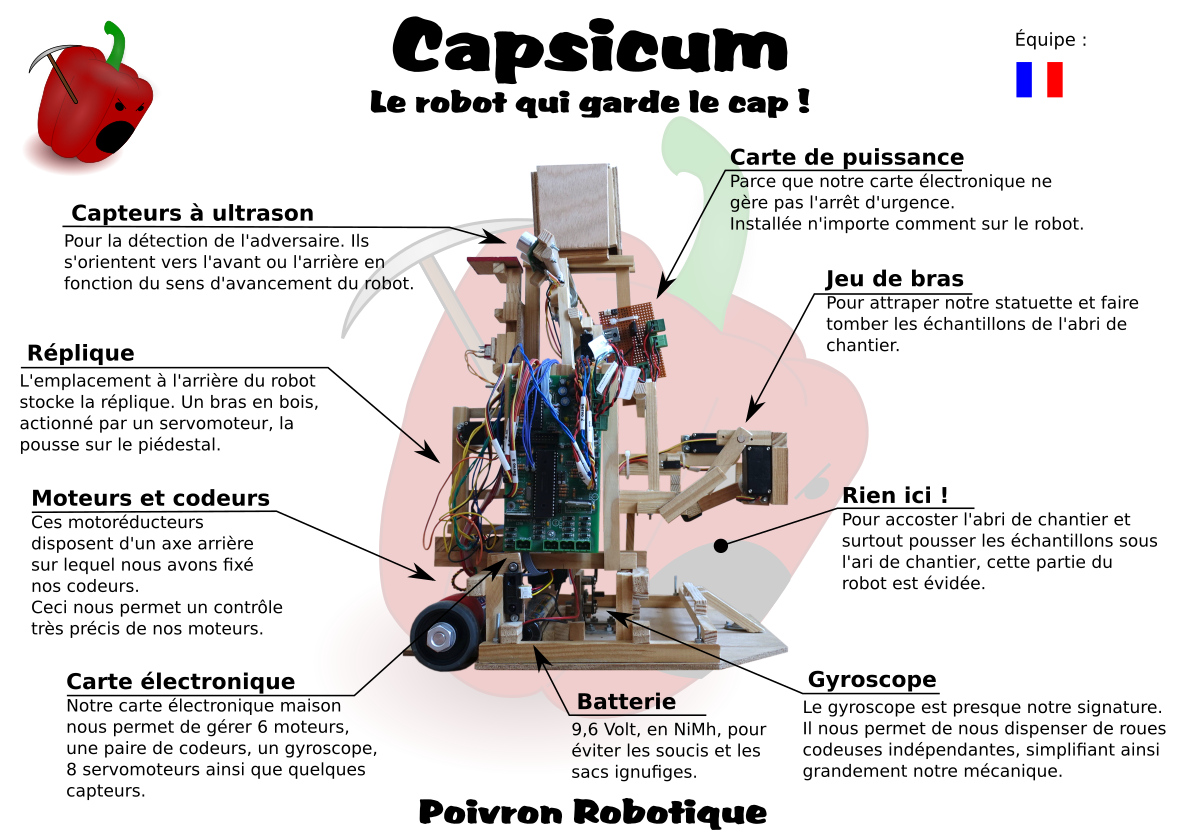
Poster Eurobot 2022
Mots clés : Coupe, Vidéo, Eurobot 2022, Photo, Poster
Poivron présente Petitpois !
13 janvier 2015
Vous venez de découvrir les robots de la TDS-Team et soyons honnêtes, ils vendent du rêve ! Un gros robot qui vise la performance avec au moins huit actionneurs et une odométrie haute de gamme. Leur petit robot présente un moyen subtil et délicat de monter les marches.
Ici, chez Poivron, nous vous proposons plutôt le contraire. Notre gros robot sera basé sur celui de 2014, une planche de contre-plaqué à l’odométrie approximative qui servira de porteur pour notre robot secondaire. Il déposera celui-ci près des marches. Quant à notre robot secondaire, nous venons de valider notre prototype qui sera très proche de notre robot final. Le voici en vidéo :
La vidéo est disponible en 720p ici (Ogg - 2 Mo)
Rien de subtil, mais ça semble marcher.

Petitpois prêt à grimper

Petitpois grimpe
Administration du site