Le poussoir !
16 décembre 2021
Voici le résultat du travail du week-end dernier : un peu de mécanique et un peu de programmation.
La dépose de la réplique a été accélérée et mérite encore un peu d’affinage.
Pour pousser les carrés de fouille, le robot doit longer le bord du terrain. Notre capteur infrarouge rempli pour l’instant parfaitement son rôle. Notre mécanique, sommaire et élégante, semble fonctionnelle. Nous avions un doute quant à la force nécessaire pour faire basculer le carré. Nos essais ont validé le système !
Voici le poussoir rentré :
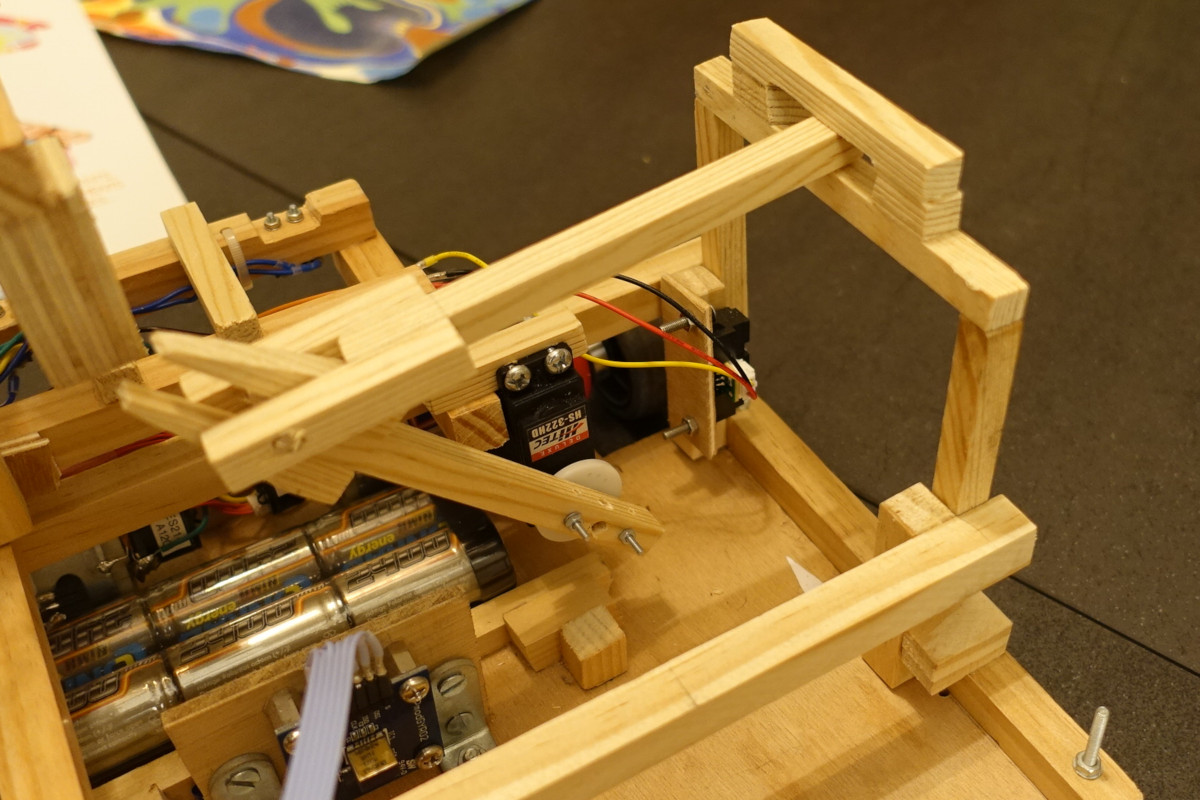
Poussoir rentré
Et voici le poussoir sorti :

Poussoir sorti
Et pour finir une petite vidéo :
La vidéo est disponible en 720p ici (mp4 - 50 Mo)
Commentaires
Il n'y a pas de commentairesAjouter un commentaire
Copyright "POIVRON" 2011-2023, tous droits réservés
Administration du site
Administration du site