Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !
Dernières nouvelles
Journal - 3 novembre 2022 - Aspiration et Gyroscope
3 novembre 2022
Deux semaines qui n’ont pas été des plus fructueuses, mais nous avons quand même quelques avancées à présenter...
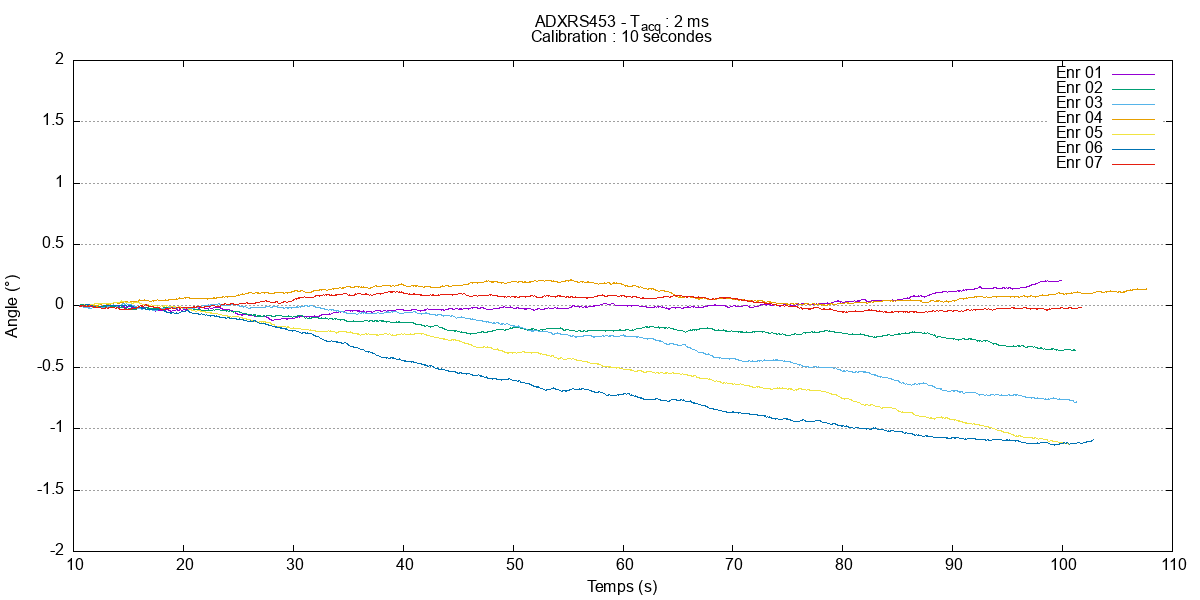
Le gyroscope et le Rpi Pico
Nous sommes passés à l’ADXRS453, censé être plus stable. Nous avons eu du mal à obtenir nos premières valeurs et les premières mesures n’ont pas montré de différences significatives avec notre L3DG20H.
En statique, la vitesse renvoyée varie de +/- 0,01°/s sur les deux modèles.
L’ADXRS453 a quand même plusieurs points pour lui, notamment une compensation de la température intégrée. Les résultats en intégrant la vitesse sur 90s sont entre corrects et bons.
Côté mécanique - Aspiration des balles
C’est l’aspiration des balles qui nous fait transpirer en ce moment. Notre premier prototype en papier et carton montrait que la turbine avait une puissance d’aspiration suffisante pour attraper les balles.
Notre second prototype avait pour mission de :
- Montrer la faisabilité technique d’utiliser du papier mâché
- Valider les grands principes de fonctionnement : avoir un tuyau large pour limiter les pertes de charge du flux d’air et utiliser un guide à l’intérieur du "tuyau" pour dévier les balles du flux initial.
Réalisé en papier mâché, il a fallu le découper dans la longueur pour extraire le "moyeu". Notons l’astuce du papier d’aluminium pour éviter que le papier mâché colle à la forme !

Ce qui permet d’installer les guides, ici en fil de cuivre, pour dévier la balle du flux d’air.

En recollant les deux morceaux, nous obtenons notre pièce terminée.

Les résultats ne valident pas intégralement la solution. Le système attrape les balles/cerises mais dès que le tuyau s’élargit, l’aspiration n’est pas suffisante pour continuer de soulever les balles, de les projeter contre le guide (qui est au-dessus des balles) et les sortir du flux. Par contre, l’utilisation du papier mâché donne des résultats satisfaisants. Il se découpe et recolle bien ! Ce qui nous incite à réaliser une nouvelle pièce qui pourrait être la pièce finale. Il sera possible de la couper et recoller sans tout refaire de zéro.
Nous partons sur un conduit fin 26mm de diamètre, sur une séparation des balles du flux d’air sur une section relativement horizontale avec le flux d’air allant vers le haut, la balle vers le bas. Nous agrandissons aussi la section à cet endroit pour que la balle ne soit plus aspirée par le flux d’air. Et bien sûr, nous installerons le guide en fil de cuivre. Voilà le plan !

Le chant du signe de Capsicum
Capsicum, notre robot 2022 fera sa - probablement - dernière sortie dans 2 semaines. Nous avons l’occasion de présenter nos activités de robotique. Si vous passez dans le coin, venez nous retrouver à la médiathèque de Riom, le samedi 19 novembre 2022.
Est-ce que ceci nous motivera pour écrire une page de présentation pour Capsicum ? Peut-être...
Mots clés : Conception, Mécanique, 2023
Analyse cinematique d’un robot holonome
4 septembre 2022
Toujours pas de maquette d’un robot holonome en vue (même si nous avons retrouvé nos pièces), mais voici la présentation de la cinématique d’un robot holonome. Le raisonnement a été le suivant :
Nous pouvons connaître la rotation de nos moteurs, donc la composante selon un axe de la vitesse des roues. Pouvions-nous, à partir de ces vitesses déterminer la vitesse du robot ? C’est notre premier article.
Puisque c’est possible, exprimons ces vitesses. c’est le sujet du deuxième article.
Maintenant que nous pouvons connaître le déplacement du robot à partir des vitesses des roues, pouvions-nous faire l’inverse ? Trouver comment commander les trois moteurs en fonction d’un mouvement souhaité ? C’est notre 3ᵉ article !
Le tout est rangé dans "Nos études", bonne lecture !
Mots clés : Mécanique, Robot holonome, 2023
Robot holonome
2 septembre 2022
Nous n’avons toujours pas avancé sur la réalisation de la maquette du robot holonome. Cependant nous travaillons sur un potentiel robot holonome. L’un des points compliqués du robot holonome est de connaître sa position.
Sur un robot différentiel, l’utilisation de roues codeuses indépendantes donne de bons résultats (sur une sol plat). La solution utilisée sur nos robot dérive de celle-ci, avec un gyroscope et des codeurs à l’arrière des moteurs de propulsion. C’est cette solution que nous essayons d’appliquer à un robot holonome. Mais dans ce cas, les relations entre les vitesses des moteurs et la vitesse du robot est un peu plus compliquée.
Si vous êtes prêt pour un voyage avec de la trigonométrie, des tenseurs cinématiques et des matrices, voici notre article qui se penche sur le sujet.
Mots clés : Mécanique, Robot holonome, 2023
Avancement mi-novembre 2021
13 novembre 2021
Quoi de neuf ?
La reproduction du terrain
Nous ne ferons pas un terrain complet. Pas avant plusieurs mois en tout cas. Mais nous réalisons l’angle qui accueille la statuette ainsi que les échantillons qui se trouvent dessus.

Angle du terrain 2022
Le robot
Nous avons dépouillé notre ancien robot, il ne lui restait que la planche de base, les moteurs, le gyroscope et la carte électronique.

Robot tout nu
Nous nous faisons un petit plaisir, nous construisons un support mobile pour la carte électronique. La carte sera en position verticale pour un match, mais son support peut se mettre en position horizontale pour faciliter les branchements et les mesures.

Robot 2022 - carte électronique pliée

Robot 2022 - carte électronique dépliée
L’inconvénient, c’est que nous devons refaire tous nos câbles en plus longs. Et ça, ça va nous occuper un petit moment.

Robot 2022 - support carte électronique
Côté actionneurs, nous en avons commencés deux. Le premier pour attraper la statuette, le second pour déposer la réplique.
Actionneur de la statuette
Nous comptons sur du velcro pour attraper la statuette. Notre bras n’utilisera qu’un servomoteur pour attraper et déposer la statuette. Le bras est construit, mais il faut encore le fixer sur le robot.
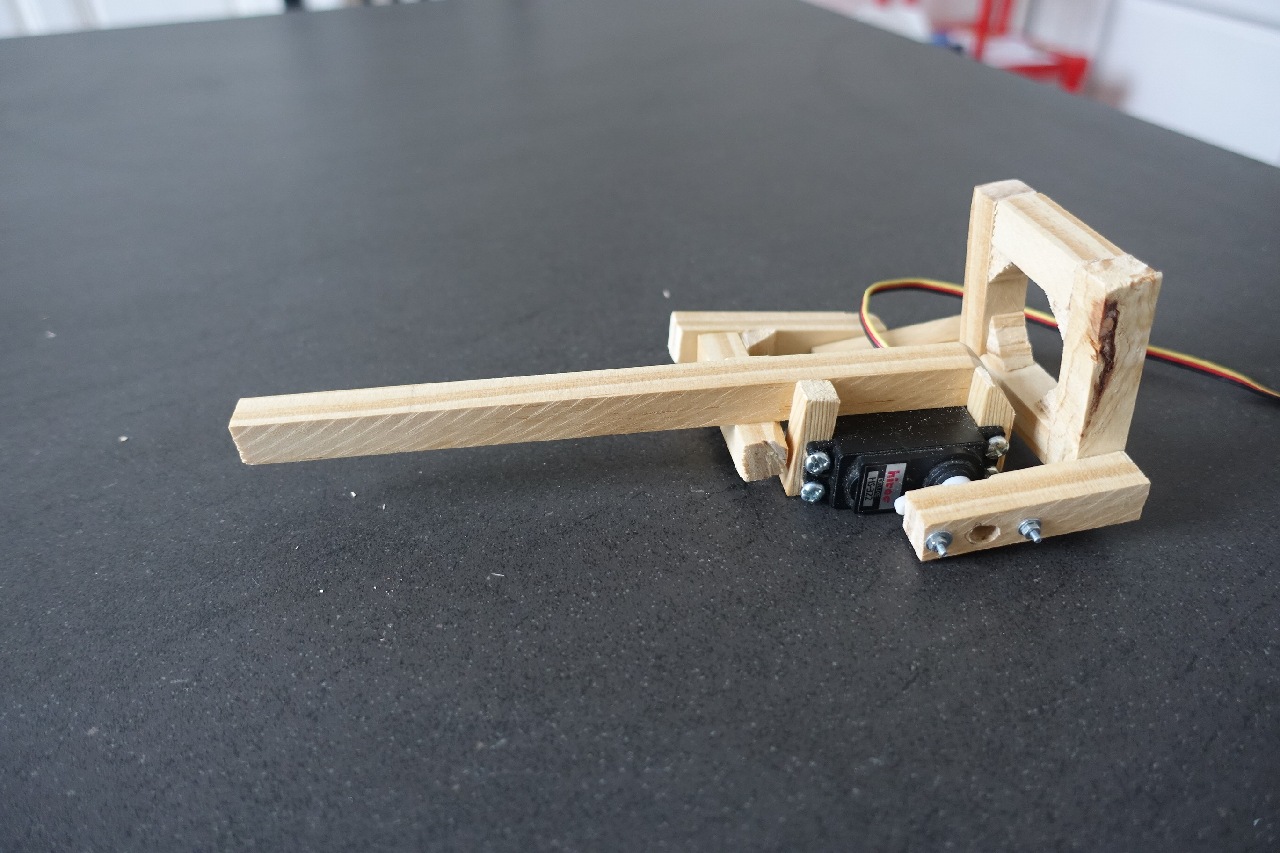
Actionneur de la statuette
Actionneur de la réplique
Pour l’instant, nous n’avons mis en place que les deux contacteurs qui nous indiqueront le bon positionnement du robot. Avec deux contacteurs, si le robot n’est pas bien positionné, il est possible de savoir de quel côté il doit se décaler. Nous avions utilisé un système similaire en 2012 pour accoster les totems qui contenaient les lingots.
Et la suite ?
Tout d’abord, nous devons finir nos câbles puis l’actionneur de la réplique. Ce sera probablement l’occasion pour le robot de faire quelques tours de roues, pour s’assurer que nous arrivons à déposer la réplique.
Ensuite, il faudra positionner l’actionneur de la statuette.
Ce qu’on se garde pour plus tard
Et oui, nous sommes loin d’avoir fini. Voici, en vrac, ce qu’il nous faudra réaliser :
- Le positionnement des capteurs d’évitement.
- la réalisation de la vitrine
- le mat balise
- le bras latéral pour retourner les carrés de fouille
- tester, tester, et ... tester !
Bref, ce n’est pas fini, loin de là !
Mots clés : Coupe, Mécanique, Eurobot 2022, Photo
Le robot avance droit
2 avril 2012
Le code a bien avancé, et il ne nous manque pas grand chose pour homologuer le robot. Le bouton d’arrêt d’urgence est fixé. Coté mécanique, il nous manque encore la prise pour la tirette et le bouton de sélection de la couleur.
Les essais avec la CMUcam (notre caméra) se sont révélés plutôt concluants.
En bonus, une vidéo du robot qui avance droit.
Mots clés : Essais, Mécanique, Programmation
Administration du site