Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !

Dernières nouvelles
Nouvelle carte électronique
26 mars 2013
Nous avons reçu la nouvelle carte électronique pour notre robot jeudi dernier. Nous venons de finir de la souder et le gros du débug semble fait car notre microcontrôleur répond correctement au PC. Notre limite en courant par moteur passe de 0,6 A à 4 ampères (en continu) !
Les moteurs n’ont plus qu’à bien se tenir !
Petit essai
27 février 2013
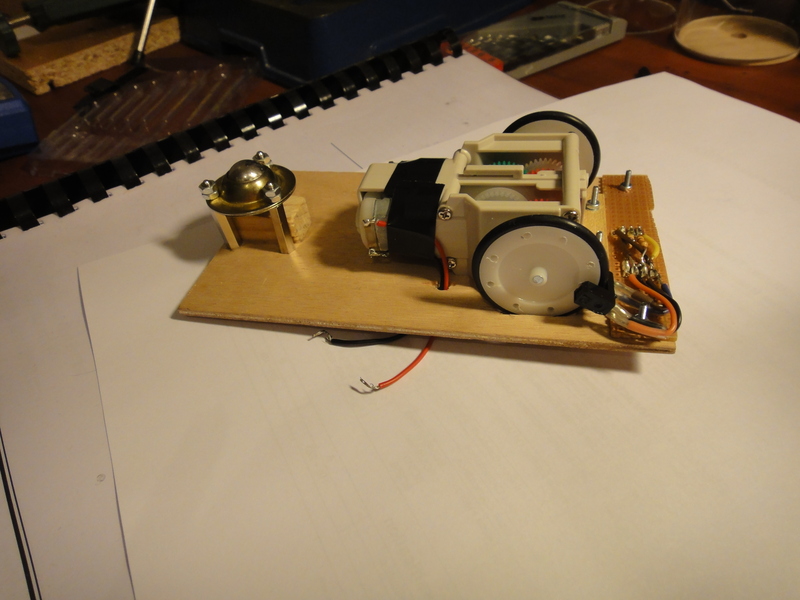
Encore presque un mois sans nouvelle, encore à cause d’un emploi du temps chargé par ailleurs mais ce coup-ci, nous avons un petit quelque chose à vous montrer.
Après avoir réalisé une première carte électronique nous avons pu essayer de faire rouler le robot. Ça n’a pas été sans mal. Nous avions prévu de mettre les sorties d’un L293D en parallèle et ça s’est très mal passé. Ça c’est très mal passé parce que ça marche avec l’un de nos composants (un L293D) et pas avec les nouveaux que nous avons achetés (des L293DNE).
Après un premier essai d’alimenter le moteur avec un L293DNE, le composant se met à chauffer dès qu’il est sous tension, même s’il ne doit débiter aucun courant. Ce sont trois composants qui ont grillé avant de nous décider à supprimer la mise en parallèle des sorties.
Enfin, ça marchait à peu près, nous essayons alors d’asservir le robot en rotation. Nous sommes en terrain plutôt connu et notre robot avance droit. À la fin de l’effort, une odeur de chaud se fait sentir, notre L293DNE n’a pas tenu la charge. Nous décidons alors de faire une vraie carte électronique avec des L298...
Mais tout n’est pas perdu, nous avons pu faire une petite vidéo :
Nouveau départ !
5 février 2013
Le manque de temps fait que nous avons vraiment revu nos objectifs. Pour garder un aspect ludique, nous essaierons de faire l’un des robots les plus économiques à la coupe.
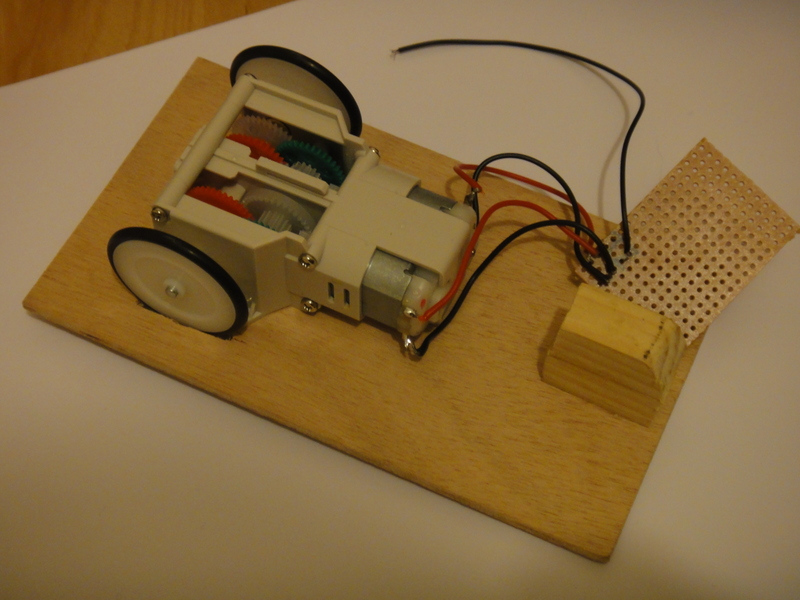
La construction du robot a enfin commencé ! Comme promis, nous nous servons du kit bi-moteurs pour la propulsion. Notre 3e point d’appuis est une petite bille folle.
Roue codeuse maison
Pour la première fois, nous utiliserons une roue codeuse sur notre robot. Nous avons percé notre roue et installé une fourche optique. Le système semble marcher, nous avons 8 impulsions par tour. Il est encore possible de doubler notre précision, mais ca n’ira pas plus loin.

Base roulante 2013
La carte électronique est bien commencée. Les ponts en H ne sont pas encore soudés mais ça ne saurait tarder... L’avantage de réutiliser tous les ans le même schéma de base, c’est que cette année, nous n’avons pas eu besoin de réaliser de plan avant de souder. Nous en publierons quand même un si nous avons le temps.
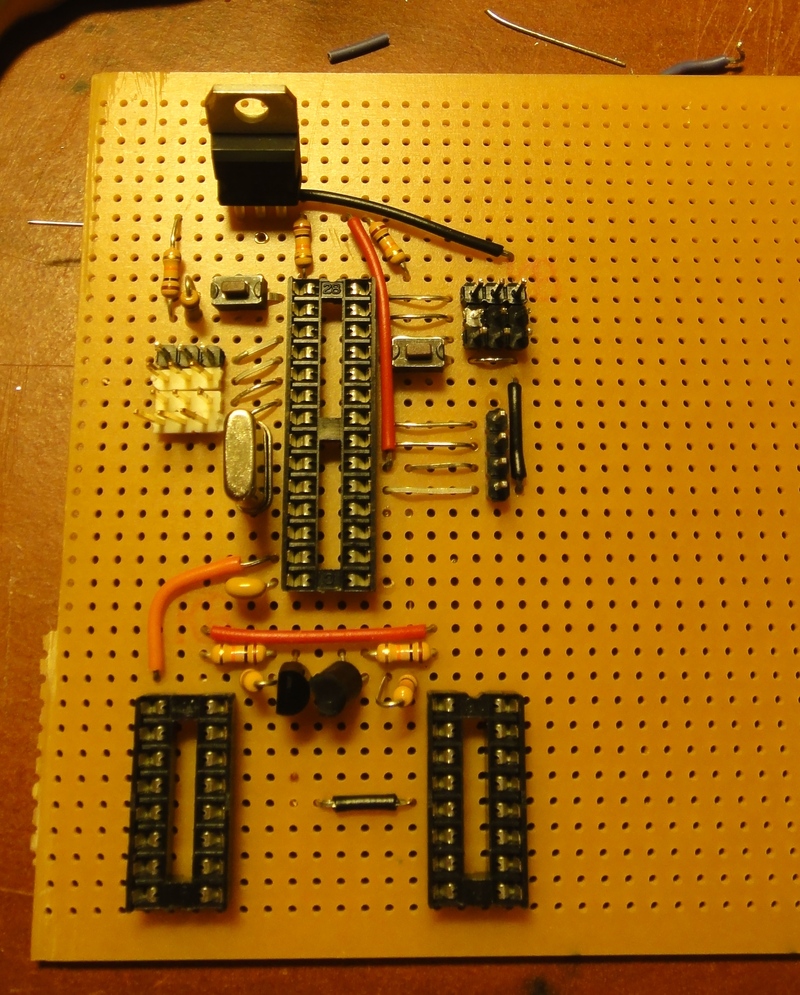
Carte électronique pour robot 2013
Avec un robot plus petit, nous essayerons de soigner notre robot, notamment les interfaces méca/élec. Nous essayerons d’éviter l’habituel sac de noeud.
Pour des raisons évidentes, nous ne dévoilons pas document de conception, mais nous vous assurons qu’il y aura un gyroscope à bord du robot !
3 mois sans nouvelles, aïe !
21 janvier 2013
C’est la date limite pour rendre les projets (merci le forum de planète-sciences) qui nous a sorti de notre torpeur. On s’est quitté il y a 3 mois et la conception du robot n’avait pas beaucoup avancé.
Depuis, il ne s’est rien passé. Enfin rien du coté du robot. Du coup, on oublie pour l’instant les mécanismes sophistiqués, on revoie notre stratégie et même nos principes et on repart sur une nouvelle base.
C’est un mélange de plusieurs réflexions qui trainaient :
- Et si on concevait un seul robot pour en construire deux ?
- Que nous apporte l’utilisation du gyroscope ?
Tout ça nous a amené à l’idée suivante.
Et si on faisait un robot avec ça :
Base roulante 2013
Oui, il faut une petite base roulante pour qu’elle convienne aux deux robots. Grâce au gyroscope, la précision de la mécanique n’a pas besoin d’être extraordinaire. Et on a même idée de mettre un semblant de roue codeuse. Pour ceux qui veulent en savoir un peu plus, voici notre dossier projet :

Nous avons un petit paragraphe pas très élégant pour expliquer au jury qu’on savait à peu près ce qu’on faisait et que oui, on était au courant qu’on était à la bourre.
Mots clés : Conception, Coupe, Projet
Un premier prototype pour monter les verres
27 octobre 2012
Voici notre premier prototype pour lever les verres. Bien qu’il ne soit pas fonctionnel, il nous a permis de valider le concept et de dimensionner un servomoteur.
La suite bientôt si tout se passe bien !
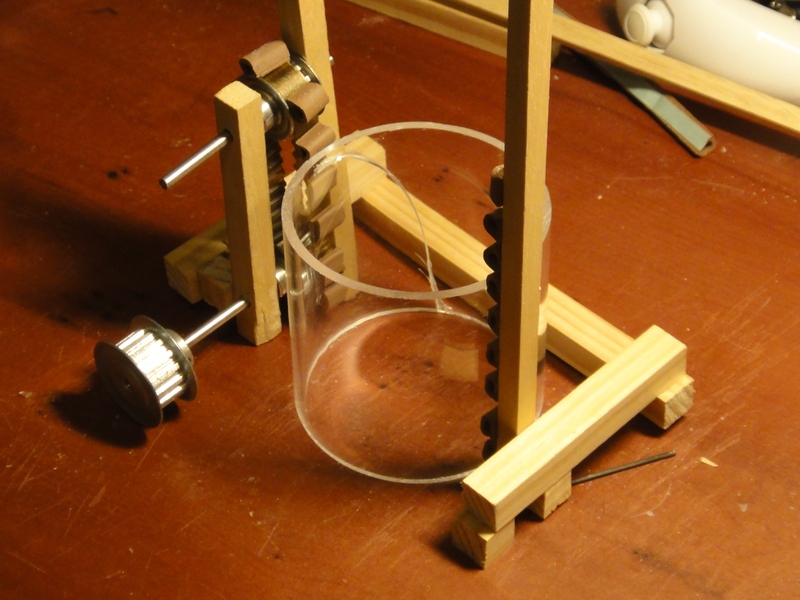
Prototype pour un monte-verre
page précédente 1 ... 18 19 20 21 22 23 24 25 26 ... 37 page suivante
Administration du site