Nouveau départ !
5 février 2013
Le manque de temps fait que nous avons vraiment revu nos objectifs. Pour garder un aspect ludique, nous essaierons de faire l’un des robots les plus économiques à la coupe.
La construction du robot a enfin commencé ! Comme promis, nous nous servons du kit bi-moteurs pour la propulsion. Notre 3e point d’appuis est une petite bille folle.
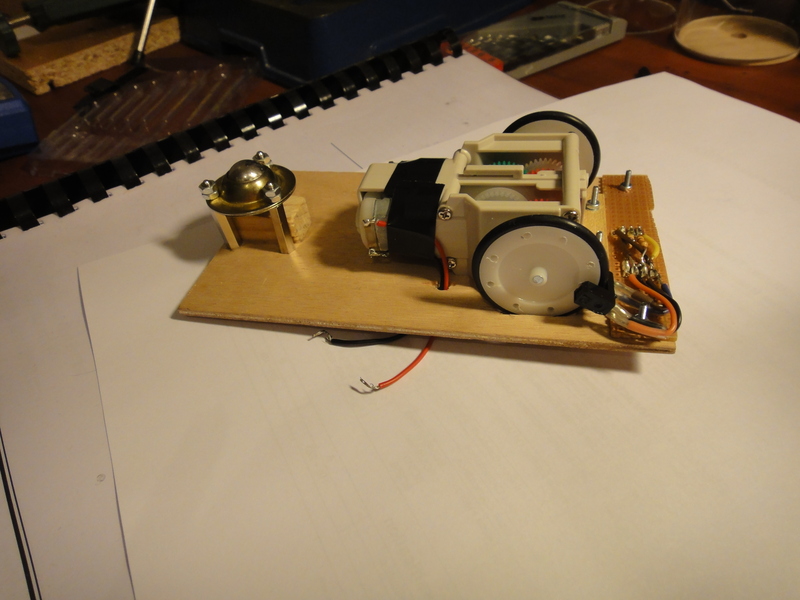
Roue codeuse maison
Pour la première fois, nous utiliserons une roue codeuse sur notre robot. Nous avons percé notre roue et installé une fourche optique. Le système semble marcher, nous avons 8 impulsions par tour. Il est encore possible de doubler notre précision, mais ca n’ira pas plus loin.

Base roulante 2013
La carte électronique est bien commencée. Les ponts en H ne sont pas encore soudés mais ça ne saurait tarder... L’avantage de réutiliser tous les ans le même schéma de base, c’est que cette année, nous n’avons pas eu besoin de réaliser de plan avant de souder. Nous en publierons quand même un si nous avons le temps.
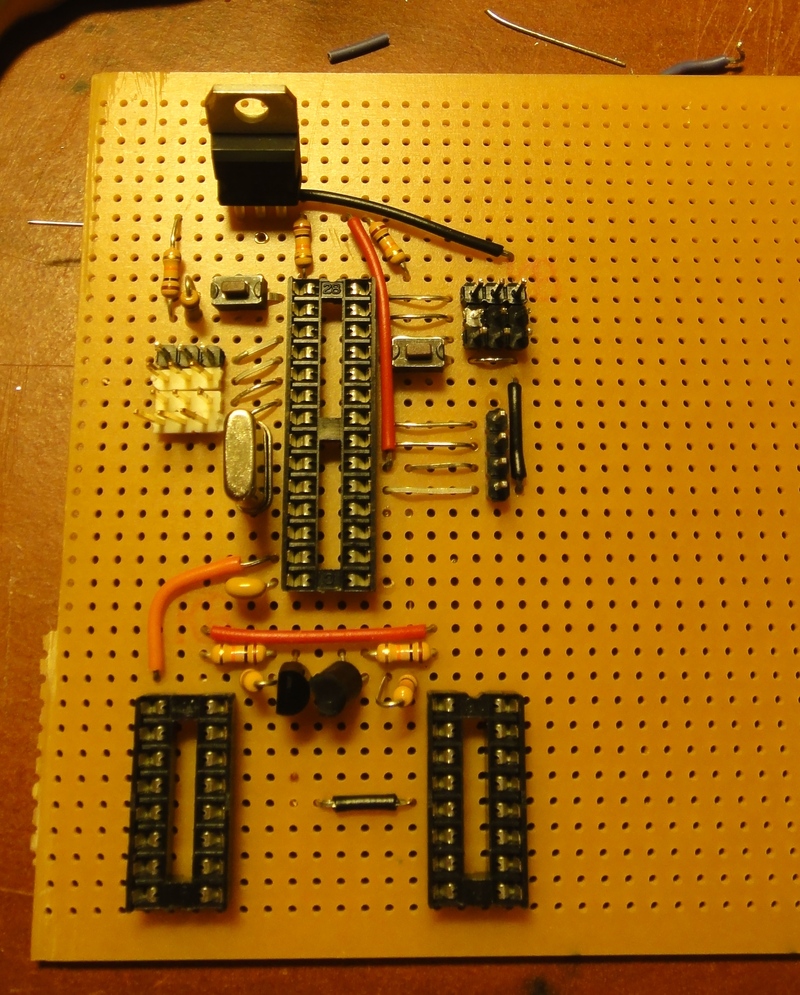
Carte électronique pour robot 2013
Avec un robot plus petit, nous essayerons de soigner notre robot, notamment les interfaces méca/élec. Nous essayerons d’éviter l’habituel sac de noeud.
Pour des raisons évidentes, nous ne dévoilons pas document de conception, mais nous vous assurons qu’il y aura un gyroscope à bord du robot !
Commentaires
Il n'y a pas de commentairesAjouter un commentaire
Administration du site