Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !
Dernières nouvelles
Petit essai
27 février 2013
Encore presque un mois sans nouvelle, encore à cause d’un emploi du temps chargé par ailleurs mais ce coup-ci, nous avons un petit quelque chose à vous montrer.
Après avoir réalisé une première carte électronique nous avons pu essayer de faire rouler le robot. Ça n’a pas été sans mal. Nous avions prévu de mettre les sorties d’un L293D en parallèle et ça s’est très mal passé. Ça c’est très mal passé parce que ça marche avec l’un de nos composants (un L293D) et pas avec les nouveaux que nous avons achetés (des L293DNE).
Après un premier essai d’alimenter le moteur avec un L293DNE, le composant se met à chauffer dès qu’il est sous tension, même s’il ne doit débiter aucun courant. Ce sont trois composants qui ont grillé avant de nous décider à supprimer la mise en parallèle des sorties.
Enfin, ça marchait à peu près, nous essayons alors d’asservir le robot en rotation. Nous sommes en terrain plutôt connu et notre robot avance droit. À la fin de l’effort, une odeur de chaud se fait sentir, notre L293DNE n’a pas tenu la charge. Nous décidons alors de faire une vraie carte électronique avec des L298...
Mais tout n’est pas perdu, nous avons pu faire une petite vidéo :
Tube de plexiglas
17 octobre 2012
Nous avons reçu les tubes de plexiglas de notre vendeur sur un site d’enchères en ligne.
Sur les trois tubes de 50 centimètres que nous avons commandés, l’un est fendu sur les 7 premiers centimètres. Ceci ne nous a pas empêché d’essayer de se servir de la partie fendue pour réaliser un verre. À notre grande surprise, le plexiglas s’est très bien découpé à la scie à métaux, sans exploser.
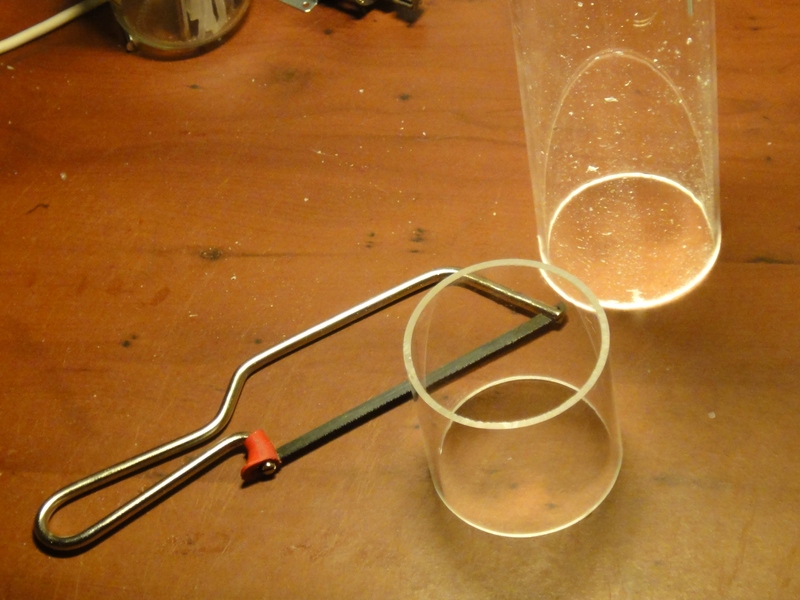
Découpe du plexiglass
On trouve sur internet, notamment sur les sites de certaines équipes, des équipes qui montrent leurs idées, notamment celles pour ramasser les verres. Pour vous tenir au courant, jetez un coup d’œil sur le portail des équipes.
Ben, y’aura pas de ça chez nous !
Quoique... Ça pourrait servir à lever des verres ?
J-"Pas beaucoup" avant la coupe
13 mai 2012
Nous sommes plutôt prêt. Même si chaque essai nous montre encore des points à améliorer, à corriger. Les bras attrape-lingot nous ont causé de petits soucis et le robot a perdu un bras attrape-pièce pendant un essai. Hier, nous avons démonté et remonté le robot pour lui serrer les vis. En se dévissant, les vis créent un jeu au niveau de la direction, impactant directement les performances de notre précieux robot.
Ceci ne nous empêche pas de présenter une belle minute de PinceMoi.
Des progrès
1er mai 2012
PinceMoi se débrouille de mieux en mieux. Son asservissement en rotation a été revu pour utiliser un véritable asservissement linéaire. Ses mouvements sont maintenant plus fluides.
Côté stratégie, voici une vidéo qui montre ses progrès :
PinceMoi et les lingots
22 avril 2012
PinceMoi a profité du week-end pour se développer. Il démarre maintenant sur ordre de la tirette, le bouton de sélection du camp de départ est fonctionnel.
Mais le gros du travail s’est fait sur la carte de propulsion et sa communication avec la carte stratégie :
- Deux capteurs soniques sont fonctionnels ;
- Le robot ralentit puis s’arrête en cas d’obstacle détecté sur les capteurs soniques ou sur les contacteurs ;
- La carte stratégie reçoit l’état de ces capteurs et peut ordonner à la carte de propulsion de les ignorer au besoin.
Ceci nous permet de nous approcher du totem et de lui piquer ses lingots !
Une version en plus haute définition est disponible ici : Ogg - 720p - 22 Mo
Administration du site