Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !

Dernières nouvelles
Le robot attrape un CD
6 avril 2012
Un pas de plus vers l’homologation ! Sur la vidéo, le robot n’a plus beaucoup de batterie, ce qui peut expliquer un asservissement lent et laborieux.
Par ici la vidéo :
Téléchargement : Ogg - 4,3 Mo | Mp4 - 10 Mo
Notre premier partenaire
5 avril 2012
Nous tenons à remercier Go Tronic, notre principal fournisseur en tout genre (électronique et mécanique) si l’on excepte les baguettes de bois.
Nous apprécions particulièrement leurs connecteurs pour circuits imprimés et leur gaine thermorétractable transparente même si celle-ci est un peu cachée dans le catalogue (code 08859).
Logo GoTronic
Mots clés : Site
Le robot avance droit
2 avril 2012
Le code a bien avancé, et il ne nous manque pas grand chose pour homologuer le robot. Le bouton d’arrêt d’urgence est fixé. Coté mécanique, il nous manque encore la prise pour la tirette et le bouton de sélection de la couleur.
Les essais avec la CMUcam (notre caméra) se sont révélés plutôt concluants.
En bonus, une vidéo du robot qui avance droit.
Mots clés : Essais, Mécanique, Programmation
Ça programme...
28 mars 2012
Notre robot se déplace en mode téléguidé. Nous avons fixé une partie des cables puis pris un peu de repos.
Nous entrons dans la dernière ligne droite, notre but est maintenant de s’homologuer. Le programme envisagé est le suivant :
- avancer droit
- trouver la pièce avec la CMUcam
- attraper la pièce
- se diriger vers la zone de dépose
- déposer la pièce.
Nous avons porté le programme de test du bras sur la carte du robot et rajouté la prise en charge du capteur de présence de la pièce.
Nous espérons pouvoir bientôt mettre une vidéo en ligne d’une homologation mais, pour cela, il faudrait que notre code ne nous reserve pas trop de mauvaise surprise.
Mots clés : Programmation
Fixation des cartes électroniques
4 mars 2012
Nous avons fini de tester les cartes électroniques, il s’agit maintenant de tout mettre sur le robot - bref, passer à l’intégration.
Nous récupérons trois cartes électronique de l’an dernier, dont une (la carte moteur) qui a besoin d’être refroidie par un ventilateur.
Il n’y a pas vraiment eut d’étape de conception pour la fixation des cartes, ce qui peut expliquer une mécanique "originale".
Quelques photos :
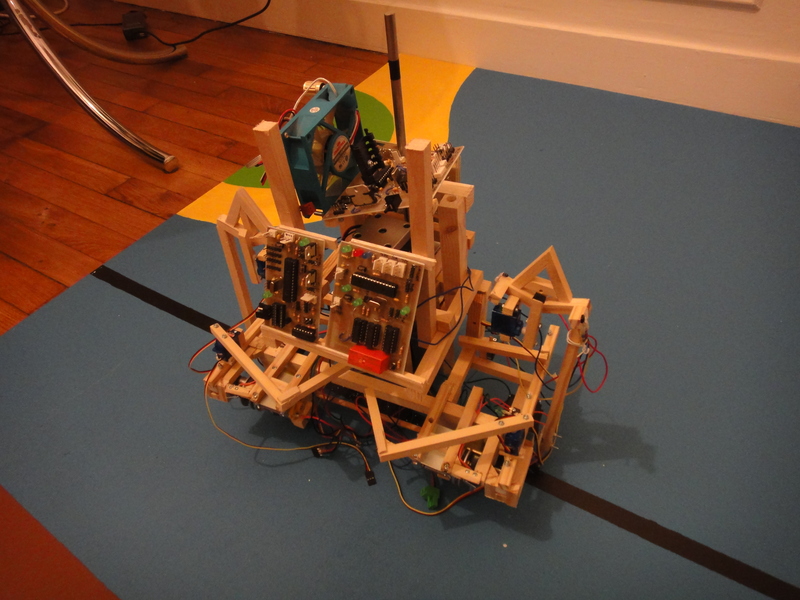
Robot avec ses cartes (1)

Robot avec ses cartes (2)
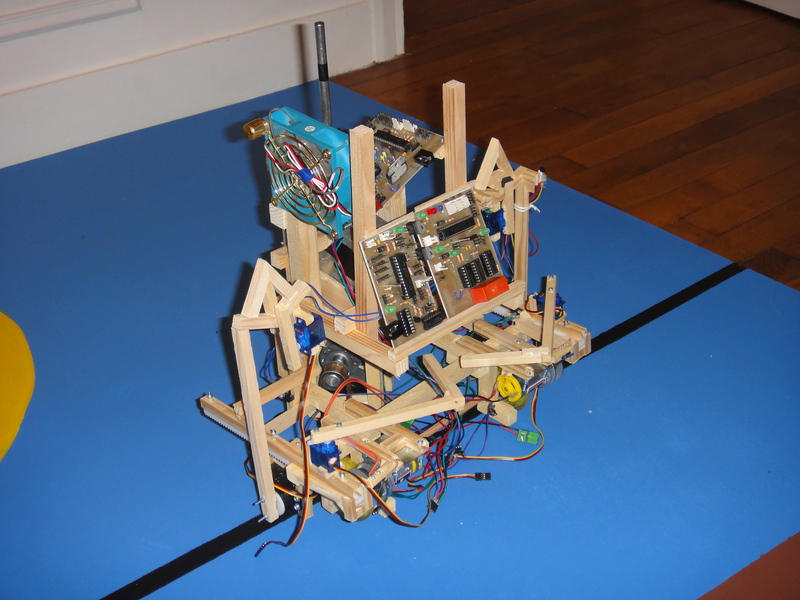
Robot avec ses cartes (3)
Un long travail nous attend maintenant pour éviter que le robot ne ressemble à un sac de nœuds.
Mots clés : Électronique, Mécanique
page précédente 1 ... 24 25 26 27 28 29 30 31 32 ... 37 page suivante
Administration du site