Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !
Dernières nouvelles
Contacteurs et détection de l’adversaire
23 février 2023
Inscription à la Coupe de France
Cette année, nous participons à la coupe de France de Robotique dans la catégorie "Legends" nouvellement créée. Une des conditions est de fournir un projet scientifique et un plan de communication. Voici le nôtre.
{kind=link}
Aspiration des balles
Le dernier prototype nous avait donné satisfaction, voici la vidéo.
Aspiration des balles avec le prototype (1 Mo).
Voici quelques photos de la construction de la version finale. Nous l’avons bien montée une fois sur le robot mais démontée presque aussi tôt pour s’occuper des contacteurs.

Aspiration cerises : démontée

Aspiration cerises : vue de face
Une autre raison pour laquelle nous avons démonté le système, c’est que lors de nos essais la turbine était maintenue à la main et que nous l’avons bousillée. Attention, les pâles de turbines sont vraiment dangereuses pour les yeux !

Turbine HS
Nous avons reçu les nouvelles turbines, mais nous ne les avons pas encore installées.
Installation des contacteurs
Les contraintes de place sont assez fortes au niveau des contacteurs. Surtout que ceux-ci doivent être protégés car nous comptons sur eux pour longer des murs. Nous avons finalement un modèle qui nous satisfait. Voici le prototype :

Contacteur désassemblé

Contacteur assemblé

Surface en PTFE pour les frottements
L’intégration nous a quand même demandé un peu de temps. Mais les contacteurs sont maintenant câblés et raccordés à la carte électronique.

Contacteur "fin de course"

Contacteurs pour longer les murs
Détection de l’adversaire
Nous avons fini la conception de nos cartes, commandé et reçu nos cartes de détection de l’adversaire.

Nous les avons aussi partiellement soudées. Nous avons commandé les mauvaises référence de LED, nous attendons la nouvelle commande. Nous n’avons pas encore soudé tous les capteurs. Nous attendons de valider un minimum le code avant de tous les souder.

Détection - dessus

Détection - dessous
Les quelques lignes de code montrent que la carte se comporte comme prévu, avec la possibilité de désactiver les capteurs un par un.
Déplacement
Nous arrivons enfin à finaliser un mouvement qui nous tenait à cœur : avancer droit en faisant tourner le robot sur lui-même.
C’est probablement l’un des mouvements le plus complexe que le robot aura à faire et donc un bon moyen de valider notre architecture.
Bref, la joie du robot holonome !
Avancement
Du côté de nos tâches :
- Reprendre les tests avec la turbine
- Aspiration : nous avons enfin un prototype concluant
- Soufflage : abandon, nous allons tenter de propulser les cerises avec des roues.
-
Placer des contacteurs sur le robot pour détecter les bordures: Fait ! - Longer les bordures
- Transformer la base roulante en robot :
- Installer le mat balise
- Intégrer la turbine : réalisation à 90%
- Améliorer la détection de l’adversaire
- Électronique : carte reçue et partiellement soudée et testée
- Programmation : sélection des capteurs opérationnelle
Mots clés : Conception, Coupe, Électronique, Mécanique, Vidéo, Photo, Robot holonome, 2023
Essais dynamiques
25 janvier 2023
Voici nos essais qui datent de début janvier, avant que nous installions proprement la carte électronique. Ce qui est fonctionnel :
- L’asservissement des roues en vitesse grâce au retour des codeurs ;
- L’asservissement en position du robot grâce au retour des codeurs et du gyroscope ;
- Le suivi d’une trajectoire avec des profiles de vitesse suivant une accélération.
La première vidéo nous a permis de mesurer les effets de l’accélération sur l’erreur de position.
Voici nos résultats :
- 6 aller-retours de 70 cm à 0,5 m/s² en 32 s, dérive : 2,0 cm
- 6 aller-retours de 70 cm à 1,0 m/s² en 38 s, dérive : 5,5 cm
- 4 aller-retours de 70 cm à 1,5 m/s en 15 s (soit 27s pour 6 aller-retours), dérive : 9,0 cm
Ce qui nous incite à privilégier les accélérations lente en début de match et tenter une trajectoire vraiment rapide en fin de match si nécessaire.
Aller-retours avec accélération contrôlée (720p - 12,3 Mo).
La petite oscillation en fin de mouvement est certainement due à une courroie détendue.
Mais là, ce ne sont que des aller-retours. Or, un robot holonome, ça permet de faire des trajectoires plutôt cool, comme une translation circulaire, que voici :
Trajectroire circulaire avec accélération contrôlée (720p - 3,3 Mo).
Mots clés : Essais, Vidéo, Robot holonome, 2023
Le robot se structure + détection de l’adversaire
15 janvier 2023
À force de faire des essais et de laisser traîner la carte sur le bureau, une patte de résistance qui traînait a arqué et ça nous a motivé à faire un support propre pour la carte électronique.

Support carte électronique
Support carte électronique
Nous avons profité de l’arrivée d’un jeune nouveau membre pour commencer la carte de détection de l’adversaire. Si tout se passe comme prévu, nous utiliserons des capteurs VL53L1X :
- Côté électronique, nous sommes proches d’avoir fini le schéma
- Côté programmation, nous arrivons à lire un capteur, notre code est sur github.
Enfin, nous avons fini notre article sur les astuces pour utiliser VS Code pour le Raspberry Pi Pico.
Du côté de nos tâches :
-
Écrire notre mémo sur l’utilisation de VSCode avec le Raspberry Pi Pico: Fini à l’instant. -
Finaliser le code i2c non bloquant: Fait ! - Reprendre les tests avec la turbine
- Aspiration : nous avons enfin un prototype concluant
- Soufflage : les premiers essais donnent une bonne piste pour le prototype
- Placer des contacteurs sur le robot pour détecter les bordures
- Longer les bordures
- Transformer la base roulante en robot :
-
Fixer la carte électronique: Fait ! - Installer le mat balise
- Intégrer la turbine : conception ok
-
- Améliorer la détection de l’adversaire
- Électronique : schéma à 90%
- Programmation : lecture du capteur ok
Mots clés : Mécanique, Programmation, Photo, Robot holonome, 2023
Raspberry Pi Pico : de la documentation !
1er janvier 2023
Bonne année à vous tous, chères lectrices, chers lecteurs !
Quoi de neuf depuis le 11 décembre de l’an dernier ?
Globalement, pas grand chose sur le robot.
Nous avons séparé le code de test du fichier principal.
Nous avons commencé les travaux sur l’I2C et perdu beaucoup de temps car notre puce TCA9535 ne répond pas. Nous avons vérifier les connexions électriques, vérifié les tensions, changé la puce, rien n’y fait. La seconde puce est-elle grillée ? La carte était-elle mal conçue ? Pour l’instant, nous ne le savons pas !
Du coup, nous nous sommes rabattus sur le 2e Raspberry Pi Pico pour travailler l’I2C. Ça a été l’occasion de mettre au propre nos notes sur la création d’un projet pour le Raspberry Pi Pico :
- Où trouver la documentation
- Installer l’environnement de développement (sur Debian)
- Créer son projet
Et de découvrir cette librairie pico_i2c_slave qui fait exactement ce que nous voulions côté esclave.
Enfin, nous avons recommencé nos moulages en papier mâché, pour l’aspiration des balles.
Lors de notre dernière news, nous avons présenté des courbes avec des accélérations et des décélérations. C’est le résultat d’un article écrit en septembre dernier que vous trouverez ici.
La suite :
- Ecrire notre mémo sur l’utilisation de VSCode avec le Raspberry Pi Pico
- Finaliser le code i2c non bloquant
- Reprendre les tests avec la turbine
- Placer des contacteurs sur le robot pour détecter les bordures
- Longer les bordures
- Transformer la base roulante en robot :
- Fixer la carte électronique
- Installer le mat balise
- Intégrer la turbine
- Améliorer la détection de l’adversaire
Mots clés : I2C, Programmation, 2023, Raspberry Pi Pico
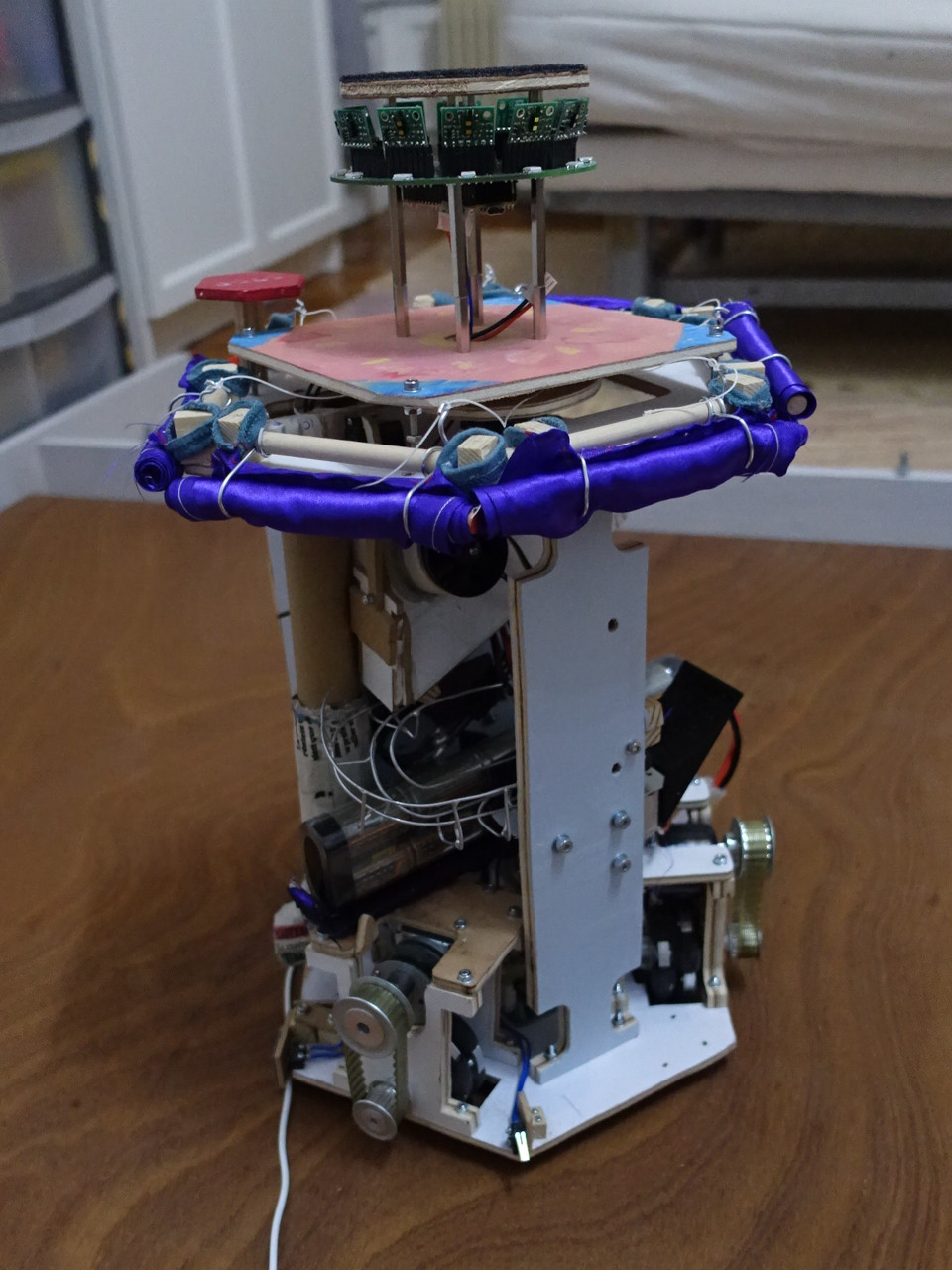
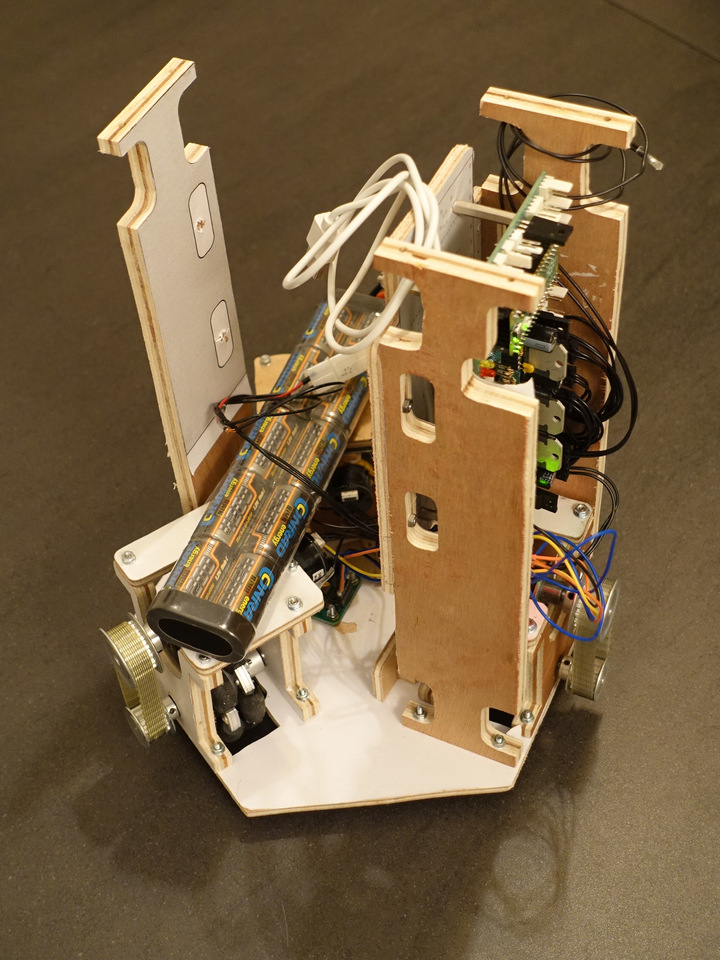
Avancées logicielles - Le déplacement avance !
11 décembre 2022
Par rapport à nos nouvelles du 2 décembre 2022, nous avons bien avancé sur la programmation des déplacements ! À ce niveau, le dernier point encore non maîtrisé est l’utilisation du gyroscope pour se positionner.
Nous avons publié notre code sur Github avec un Readme qui explique la structure du code.
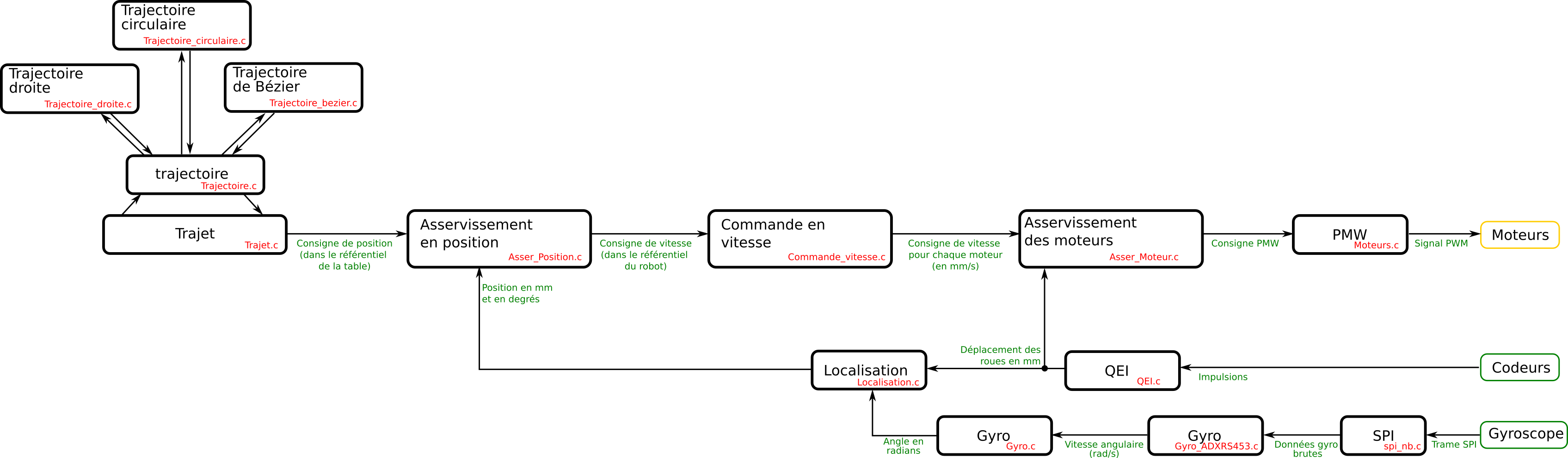
Architecture logicielle des déplacements
Pour l’instant, nous n’avons pas de belle vidéo à présenter, mais ça ne saurait tarder... Pour patienter, un test "en boucle ouverte", seuls les moteurs sont asservis en vitesse, il n’y a pas de retour sur la position du robot !
Et voici les courbes obtenues lors des essais de contrôle en vitesse avec une accélération et une décélération - ce sont bien des courbes expérimentales :
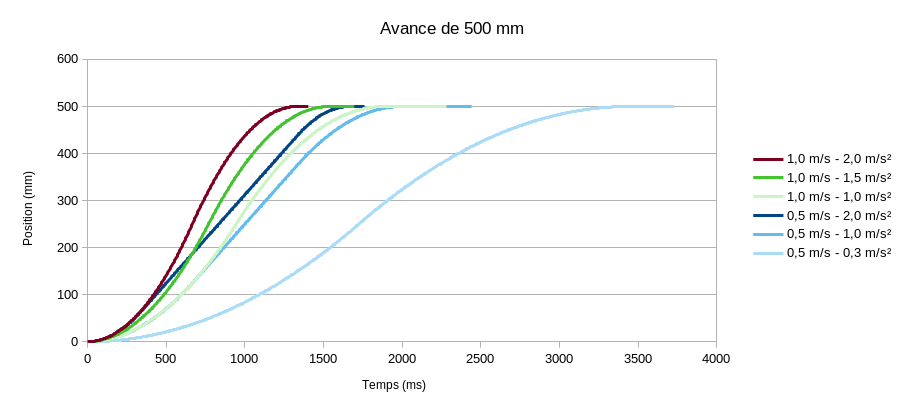
Le code supporte les trajectoires droites, circulaires ou suivant les courbes de Bézier.
Donc nous sommes - presque - prêts à nous déplacer avec classe et précision !
Mots clés : Programmation, Vidéo, Robot holonome, 2023, Raspberry Pi Pico
Administration du site