Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !

Dernières nouvelles
Programmer son PIC18F4550 en Wifi !
28 janvier 2022
Quand j’ai commencé la robotique, le seul moyen dont disposait le club pour programmer un microcontrôleur vierge était d’utiliser un programmateur série. Voici encore le mien :

Programmateur PIC série
Il vient de l’excellent site Fribotte, qui était une des grandes références vers 2005.
Ceci nécessitait d’enlever la puce du circuit à chaque programmation. Le club avait trouvé un Bootloaer USB. Il s’agit d’un programme qui s’exécute au démarrage du microcontrôleur et qui permet d’entrer dans un mode de reprogrammation de la puce. Ceci permettait de reprogrammer le microcontrôleur à l’aide d’un simple câble USB. C’était le top du top à l’époque !
C’était globalement le fonctionnement de l’Arduino à ses début (et ça l’est peut-être encore actuellement).
C’était un système qui marchait, mais les ports série se sont raréfiés, le programmateur PIC s’interfaçait mal avec les adaptateurs USB - série. Nous sommes passé au PicKit (le 3...).
Malgré cela, nous avons conservé le bootloader, plus pratique à connecter, moins lourd que les outils Microchip... Puis l’an dernier, nous réalisons que ce bootloader présentait des limites, pas en terme de fonctionnalité, mais en terme d’obsolescence. Son code ne compile plus sur les compilateurs de Microchip...
Bref, nous avons cherché un autre booloader, l’avons trouvé et nous sommes dit "et si avec un Raspberry Pi, nous pouvions programmer le robot en Wifi ?"
Petite réparation de la carte électronique
23 janvier 2022
Identification des câbles
Tout d’abord, petite nouveauté, nous avons identifié nos câbles. Comment avons nous nommés nos câbles ? De la même manière que le connecteur sur lequel ils doivent être branchés. Cela parait anecdotique, mais cela simplifie grandement le raccordement des câbles à la carte électronique.

Un soucis d’alimentation
Bien que la carte électronique date de 2013, elle n’est pas totalement éprouvée. Par exemple, les 4 moteurs annexes n’ont pas encore été testés. Les emplacements pour connecter les servomoteurs 1, 2 et 3 non plus. Ou plus précisément dans leur cas, ils ont été testés, mais notés défaillants. Le régulateur de tension U3 a même été enlevé.
Ayant besoin de ces connecteurs, nous avons remis U3 en place, mais sans que cela remette les connecteurs Servo1 à Servo3 fonctionnels. Un test de continuité indique clairement une absence de continuité électrique entre la broche 5V de U3 et celles de connecteurs.
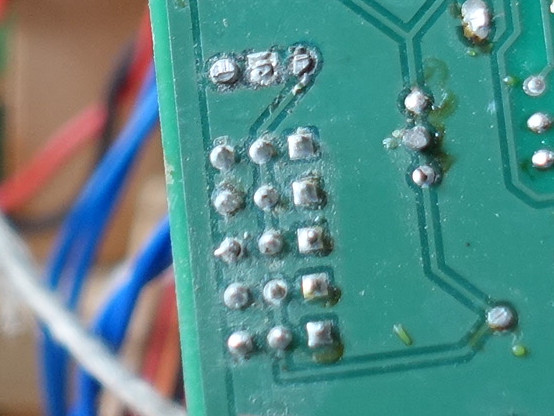
Ayant nos câbles identifiés nous les débranchons sereinement ! En retournant la carte, une zone suspecte apparaît clairement sur ce signal.

Un petit nettoyage montre une piste coupée.
Et une réparation pas très élégante mais fonctionnelle, à l’aide d’une patte de résistance, pourrait clôturer notre aventure.
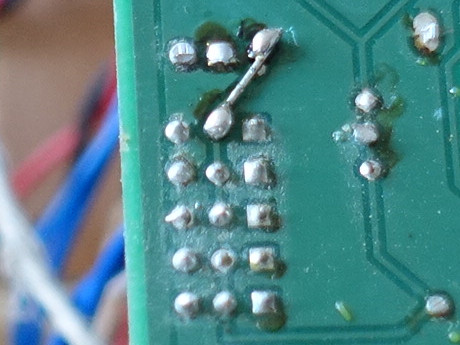
Nous voyons que nous poussons le zoom de notre appareil photo dans ses retranchements !
Et pour finir
Tant de manipulations sur des câbles historiques ne ratent pas, un faux-contact se révèle sur le circuit d’alimentation. Un test de continuité accuse rapidement l’arrêt d’urgence. En refaisant les connectiques du câble, nous identifions et réparons la connexion fautive.
Statuette et échantillons
17 janvier 2022
Modélisation avec Inskape
Nous nous servons d’Inkscape pour réaliser grossièrement des parties de notre robot. Ceci nous permet de visualiser les mouvements des actionneurs mais aussi la faisabilité de l’actionneur. Nous détectons ainsi que le servomoteur ne peut pas se mettre dans un sens car il se retrouve sur le passage d’une poutre de notre robot.
Pour concevoir l’actionneur de la statuette, nous nous sommes aidés de ce dessin :
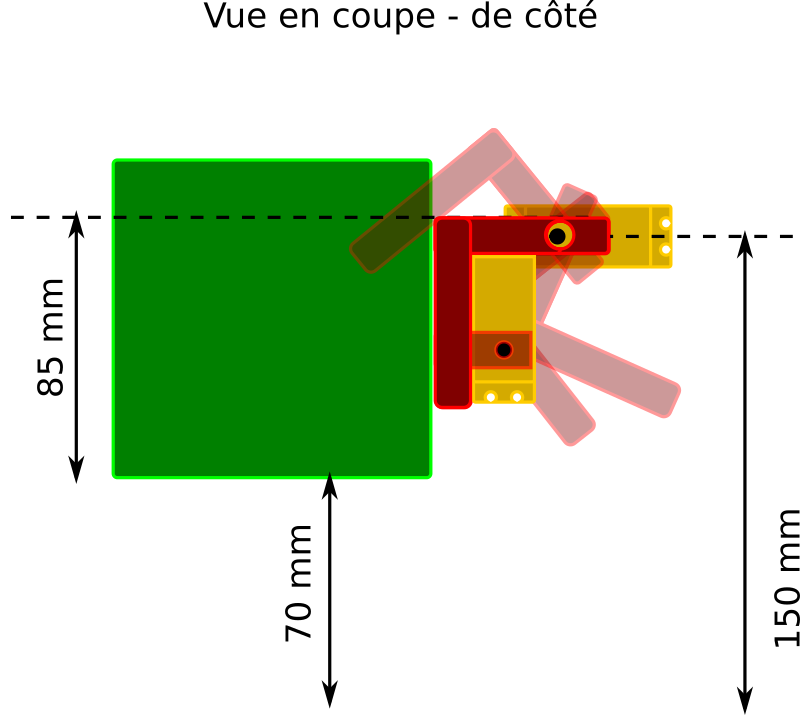
D’un coup d’œil,nous voyons à quel hauteur doit être fixé le "crochet" de la statuette et l’actionneur sur le robot.
Partant de cette idée, nous greffons dessus l’actionneur qui fera tomber les échantillons.

Réalisation mécanique
Une fois ce second actionneur terminé, nous lui rajoutons un "grip" découpé dans une chambre à air qui avait eu le mauvais goût de nous laisser tomber récemment.
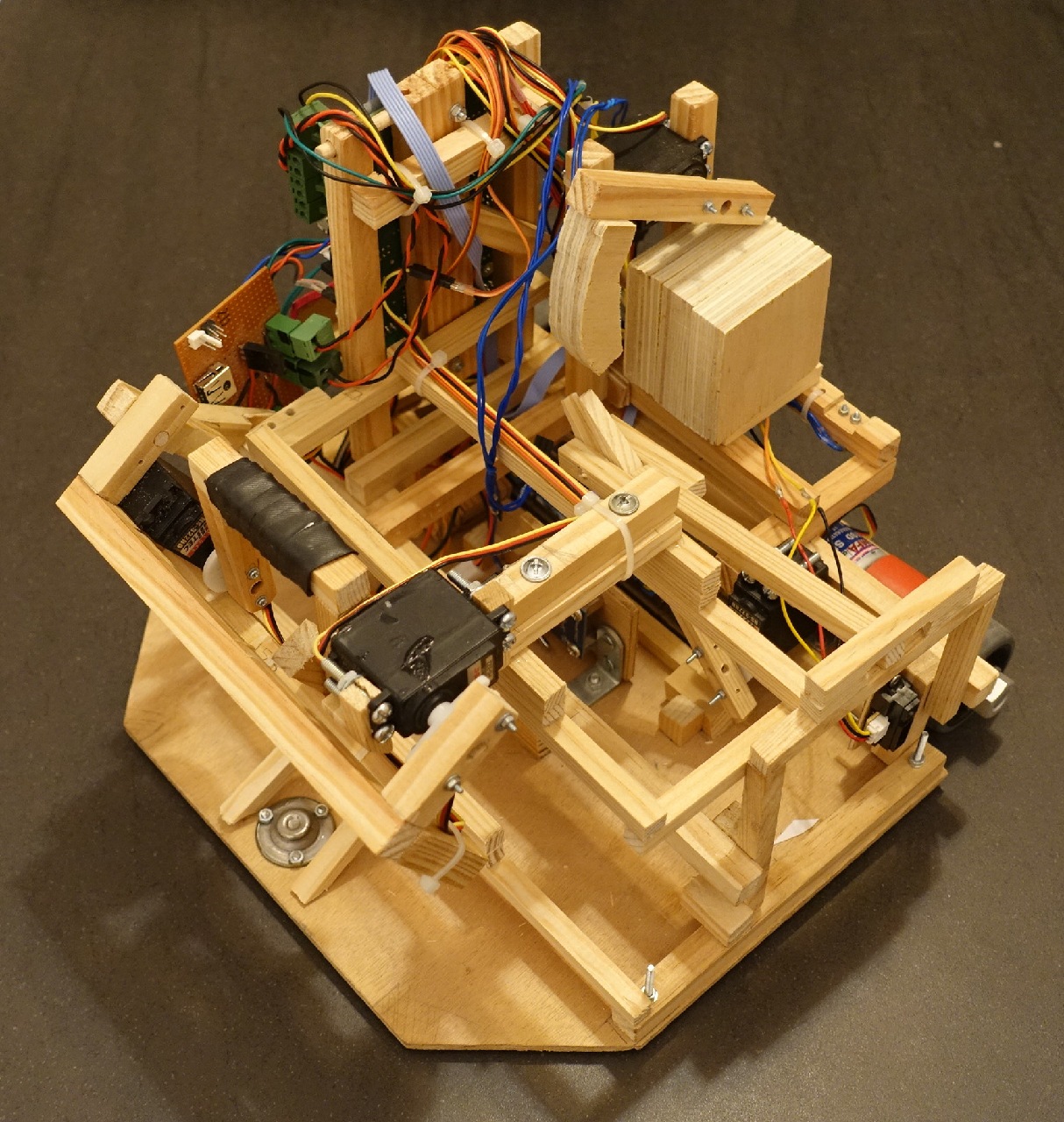
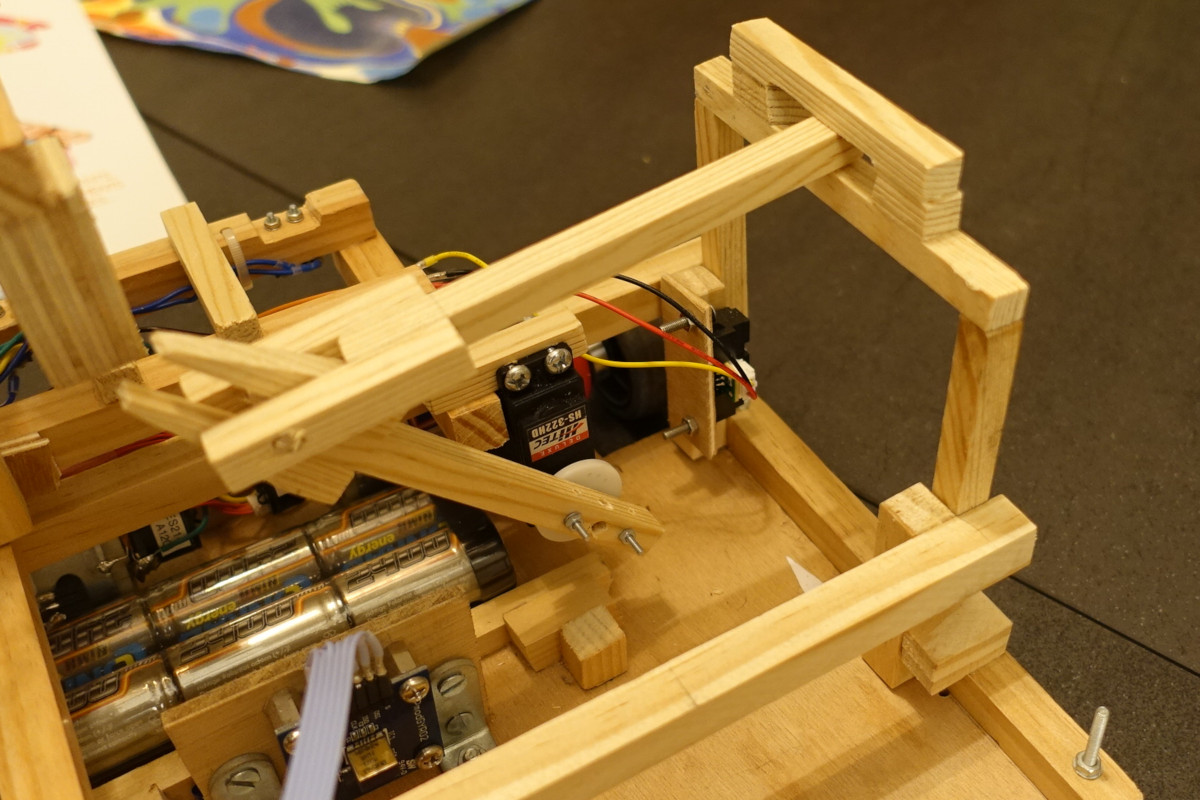
Actionneur statuette et grip pour échantillons
Nous avons aussi peigné notre robot. Le travail n’est pas fini mais les câbles des servomoteurs sont attachés et laissent apparaître la carte électronique. Merci les petits colliers "Colson". Blanc transparent, ils ne se remarquent pas - trop - sur le bois. Saurez-vous les voir ?


Les essais
Pas de gros soucis au niveau de la programmation, mais nous nous contentons que d’un code réduit, permettant de valider le fonctionnement de ces deux actionneurs.
La vidéo est disponible en 720p ici (mp4 - 20 Mo)
Le poussoir !
16 décembre 2021
Voici le résultat du travail du week-end dernier : un peu de mécanique et un peu de programmation.
La dépose de la réplique a été accélérée et mérite encore un peu d’affinage.
Pour pousser les carrés de fouille, le robot doit longer le bord du terrain. Notre capteur infrarouge rempli pour l’instant parfaitement son rôle. Notre mécanique, sommaire et élégante, semble fonctionnelle. Nous avions un doute quant à la force nécessaire pour faire basculer le carré. Nos essais ont validé le système !
Voici le poussoir rentré :
Poussoir rentré
Et voici le poussoir sorti :

Poussoir sorti
Et pour finir une petite vidéo :
La vidéo est disponible en 720p ici (mp4 - 50 Mo)
Avancement début décembre 2021
6 décembre 2021
Quoi de neuf après ce week-end ?
Principalement les capteurs infrarouge. Comme capteurs de détection de l’opposant, nous utilisons des SFR04, un devant, un derrière, qui nous ont fidèlement servis durant des années.
Cette année, nous allons vouloir longer la bordure et nous savons que notre odométrie n’est pas précise au millimètre après plusieurs déplacements. Nous installons donc des capteurs Sharp de type GP2Y0A41Y2 sur les côtés de notre robot.
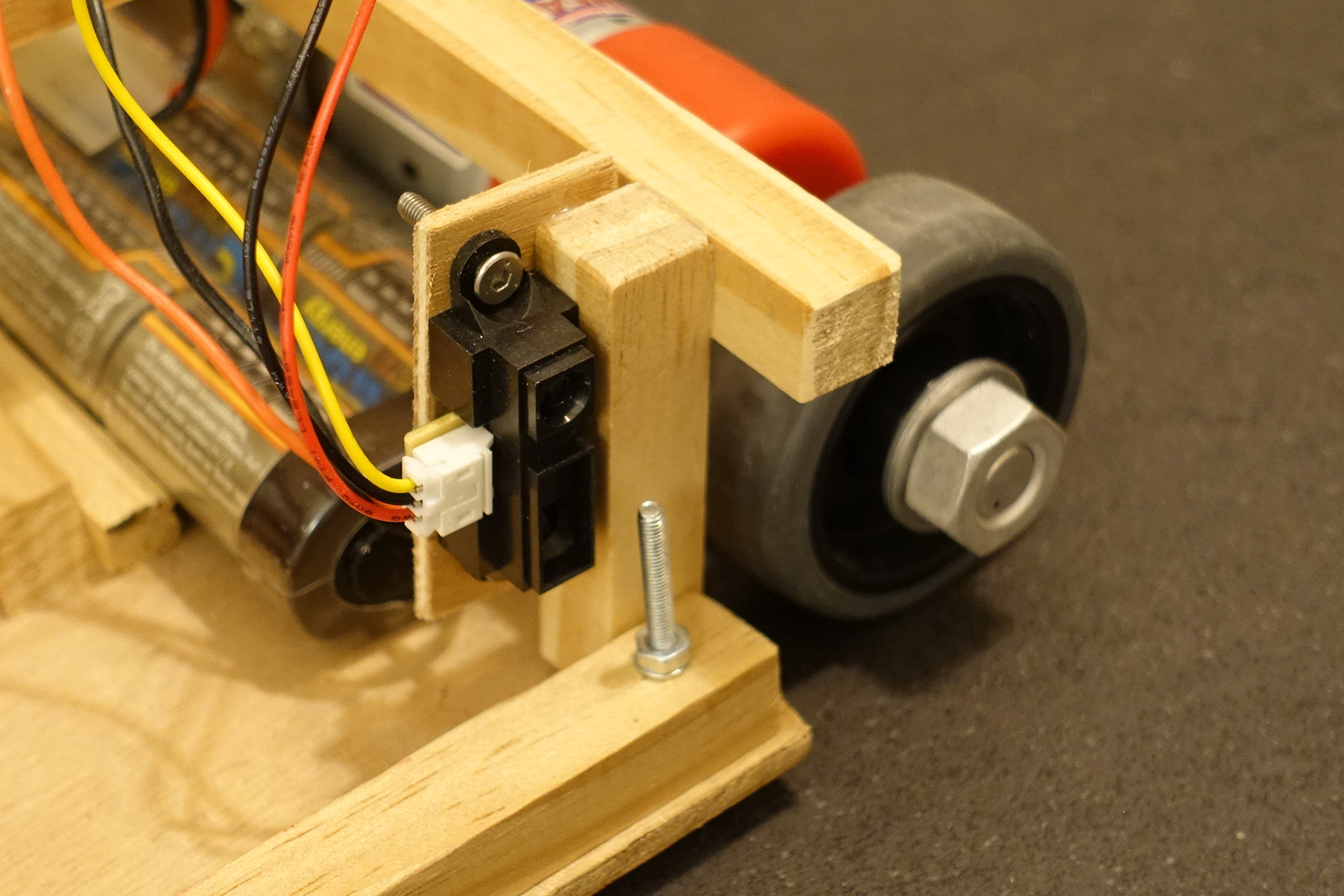
Capteur IR à côté de la roue
Après avoir testé les capteurs sur notre petite carte de développement, nous rallongeons les câbles et les raccordons sur la carte du robot.
Nous adaptons le code de la carte pour renvoyer les valeurs des capteurs infrarouge à l’interface de supervision puis adaptons le code de l’interface de supervision.
Ça marche bien... pour le capteur branché en IR_1. IR_2 refuse de donner des valeurs cohérentes. Les mesures de tension sont 10 fois plus faibles qu’attendues. Est-ce que la broche du PIC est grillée ?
Non ! Après une heure de recherche, il s’avère que le problème était logiciel. Le code des servomoteurs tentait de piloter un servomoteur branché sur IR_2. Ceci car nous avions eu un soucis avec U3, le régulateur de tension 7805 des servomoteurs 1, 2 et 3. Nous avions réaffecté IR_2 (dont nous ne nous servions pas) à Servo3. Le prix à payer pour réutiliser une carte et un code vieux de 5 ans...
(Pour visualiser ça, utilisez le plan interactif de notre carte.)
Après réaffectation des broches comme initialement prévu, les valeurs retournées sont parfaitement cohérentes.
Un dernier doute m’habite, ces capteurs ne riquent-ils pas d’être aveuglés par l’éclairage de la Coupe ?
Mots clés : Électronique, Programmation, Eurobot 2022, Photo
page précédente 1 ... 10 11 12 13 14 15 16 17 18 ... 37 page suivante
Administration du site