Statuette et échantillons
17 janvier 2022
Modélisation avec Inskape
Nous nous servons d’Inkscape pour réaliser grossièrement des parties de notre robot. Ceci nous permet de visualiser les mouvements des actionneurs mais aussi la faisabilité de l’actionneur. Nous détectons ainsi que le servomoteur ne peut pas se mettre dans un sens car il se retrouve sur le passage d’une poutre de notre robot.
Pour concevoir l’actionneur de la statuette, nous nous sommes aidés de ce dessin :
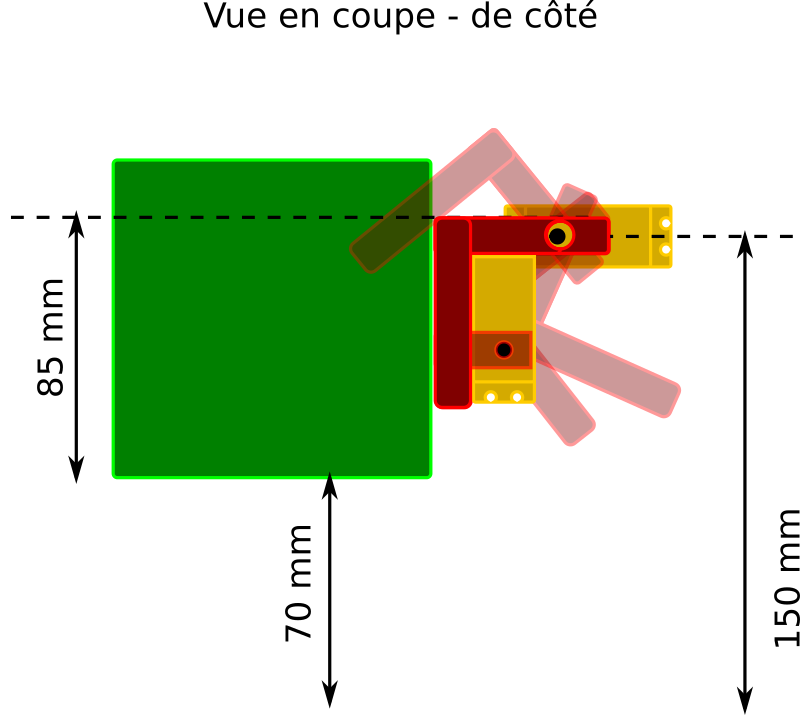
D’un coup d’œil,nous voyons à quel hauteur doit être fixé le "crochet" de la statuette et l’actionneur sur le robot.
Partant de cette idée, nous greffons dessus l’actionneur qui fera tomber les échantillons.

Réalisation mécanique
Une fois ce second actionneur terminé, nous lui rajoutons un "grip" découpé dans une chambre à air qui avait eu le mauvais goût de nous laisser tomber récemment.
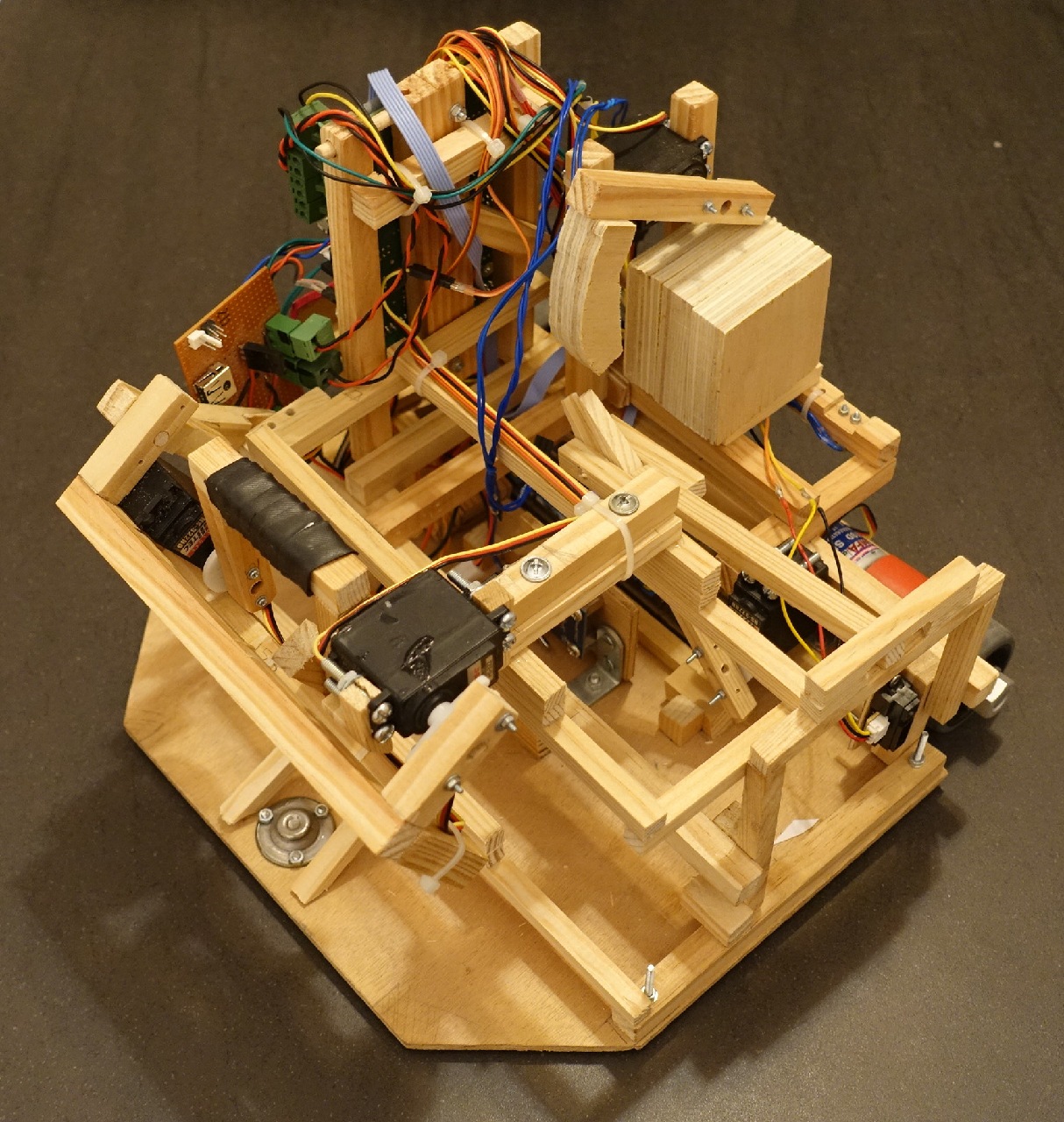
Actionneur statuette et grip pour échantillons
Nous avons aussi peigné notre robot. Le travail n’est pas fini mais les câbles des servomoteurs sont attachés et laissent apparaître la carte électronique. Merci les petits colliers "Colson". Blanc transparent, ils ne se remarquent pas - trop - sur le bois. Saurez-vous les voir ?


Les essais
Pas de gros soucis au niveau de la programmation, mais nous nous contentons que d’un code réduit, permettant de valider le fonctionnement de ces deux actionneurs.
La vidéo est disponible en 720p ici (mp4 - 20 Mo)
Commentaires
Il n'y a pas de commentairesAjouter un commentaire
Administration du site