Bienvenue sur le site de l'équipe Poivron
Ici nous vous informerons des dernières nouvelles concernant l'avancement de nos projets et autres !
Bonne lecture !

Dernières nouvelles
Encore les balises
9 février 2012
Les balises ne marchent pas encore bien. Nous avons rajouté quelques bouts de code très simples qui améliorent grandement les résultats, mais ce n’est pas satisfaisant.
Une des deux balises est vue à 30 degrés de sa position réelle. Pour l’instant nous accusons les reflets contre les murs. La zone de test est petite, et il n’est pas possible d’écarter les balises de 2 mètres sans se retrouver près d’un mur.
Cependant, nous avons quand même complété la page sur les balises pour expliquer comment nous menions nos tests (le complément sur la synchronisation arrivera, mais probablement pas avant le week-end).
Mots clés : Balises, Essais, Programmation
Notre terrain à nous !
5 février 2012
Bien que nous ayons un totem, il nous manquait un terrain.
Nous avons choisi de réaliser un demi-terrain sur deux planches de contre-plaqué (5 mm) de 1 m par 1,5 m.
Comparé à l’an dernier, où nous avions utilisé des planches de médium de 3 mm, le terrain nous semble plus rigide et plus léger. Cependant il semble s’être légèrement gondolé. Nous espérons qu’en le stockant à l’horizontal, il reviendra plat.

Terrain 2012 - Peinture |

Terrain 2012 - Peint |
Mots clés : Coupe
Balises
30 janvier 2012
Ce weekend, nous avons franchi un grand pas. Notre système de balise est passé en version 1. Une version qui devrait être fonctionnelle pour le positionnement du robot sur le terrain.
Malheureusement, les tests ne sont pas pleinement satisfaisants. Lorsque nous positionnons les balises aux distances requises par le règlement, elles se retrouvent trop près des murs et leur message semble s’y refléter, nuisant grandement à la précision du système.
Pour l’instant, nous n’utilisons que les valeurs d’angles, nous avons donc pu tester les balises sur une zone plus petite avec succès. Mais rien ne vaut un test grandeur nature.
Nous détaillerons un peu plus notre système (notamment la synchronisation des balises) dans la semaine. le code est déjà en ligne sur github, le lien doit trainer sur notre site.
La mécanique avance
27 janvier 2012
Cette semaine, nous avons scié de petites baguettes, fait de petits trous et de petits collages. Le résultat est que nos principaux actionneurs sont maintenant fixés sur le robot.
Et voila le résultat :
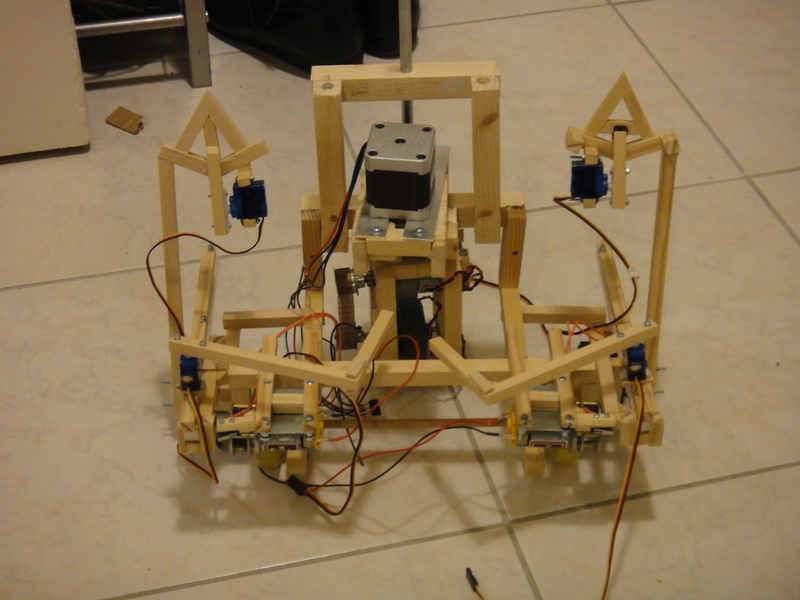
Robot 2012 plié

Robot 2012 - Pièces
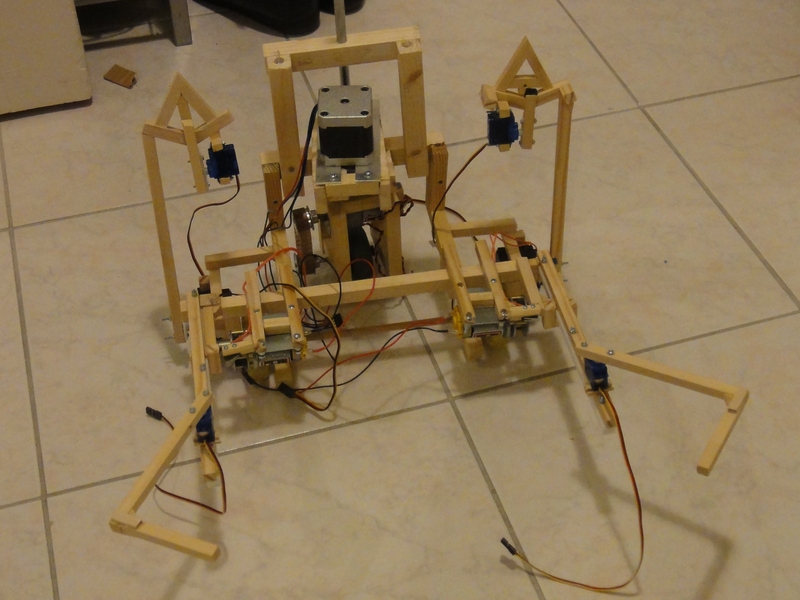
Robot 2012 - Lingots
Mots clés : Mécanique
Les vis à bois, c’est mal !
22 janvier 2012
Les vis à bois présentent de nombreux inconvénients. Principalement, elle ne proposent pas une vraie solution démontable. Pour peu que le bois soit un peu mou, les vis ne tiennent plus après trois ou quatre vissage/dévissages.
Ensuite, il arrive que la vis fasse éclater le bois lors du premier vissage. C’est ce problème que nous avons rencontré lors de notre bref passage du coté obscure.
La solution mise en place, inspirée par certains vendeurs de meubles en kit, consiste à percer 2 trous perpendiculaires, l’un pour insérer la vis, l’autre pour insérer l’écrou. On revient à un simple boulon (vis + écrou). Simple, efficace et démontable.

Perçage de 3mm pour la vis, 8mm pour l’écrou |
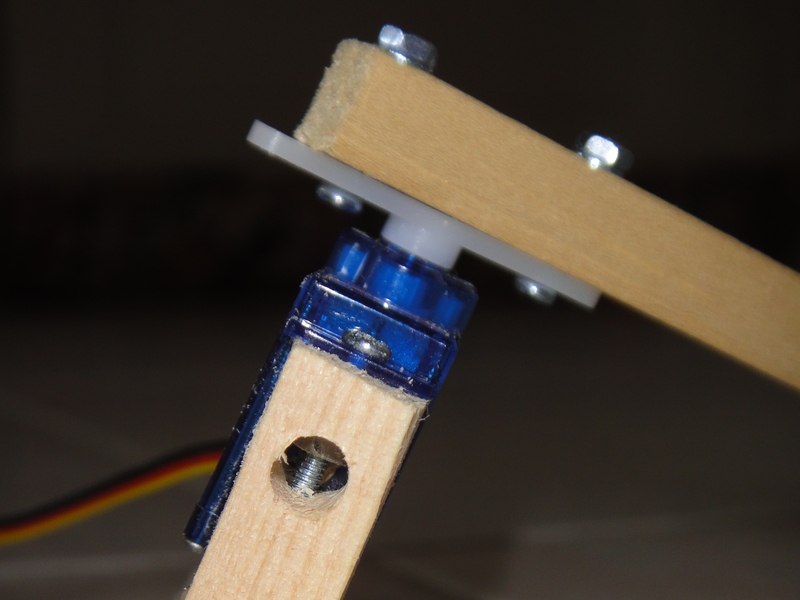
Perçage de 2mm pour la vis, 5mm pour l’écrou |
Mots clés : Conception, Mécanique
page précédente 1 ... 25 26 27 28 29 30 31 32 33 ... 37 page suivante
Administration du site