Déguisement
1er mai 2023
C’est un des points que nous tenions à réaliser et que nous nous gardions pour la fin, parce que "ce sera facile".
Ben, pas tant que ça...
Le règlement propose un nombre conséquent de points si le robot change d’aspect à la fin du match. Nous voulions faire les choses bien, en restant dans le style de l’équipe.
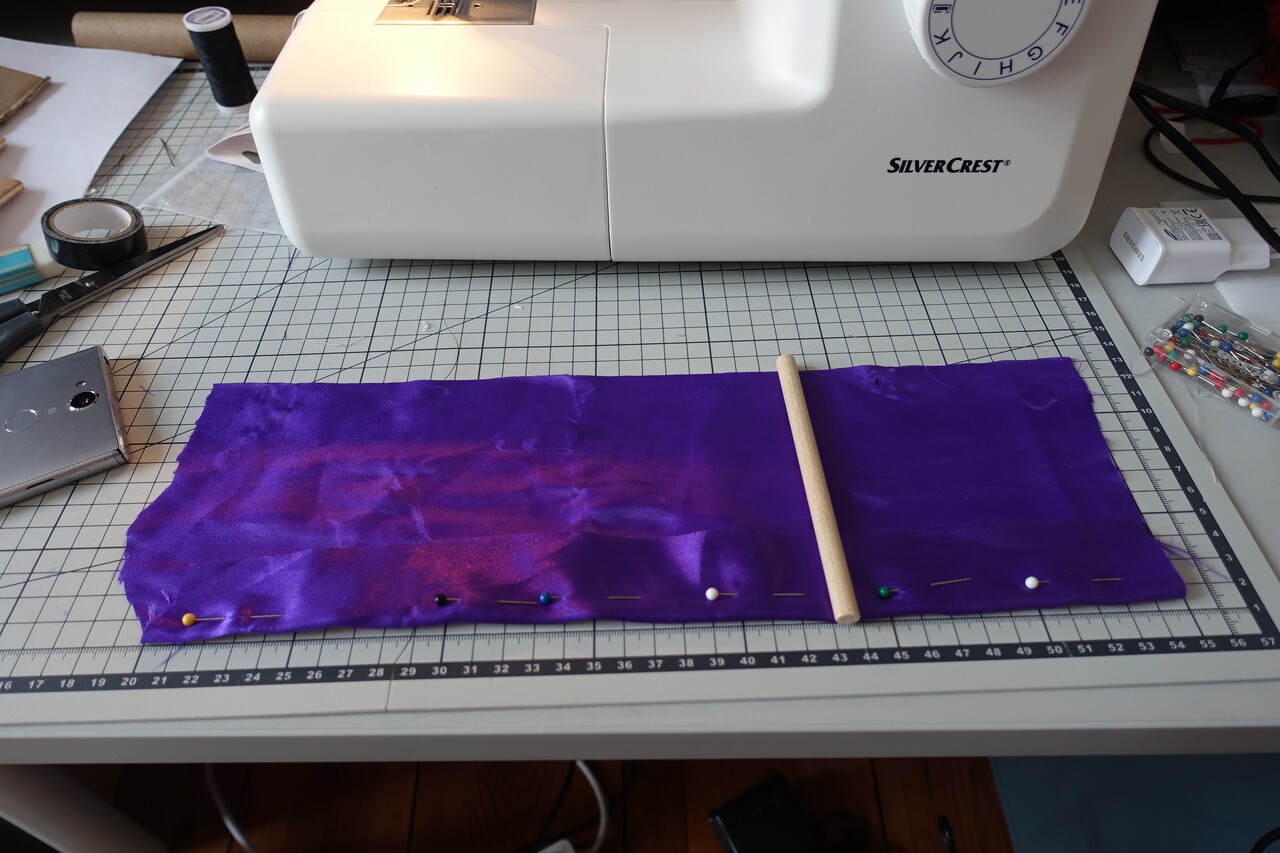
L’une des idées initiales était de faire un accordéon en papier qui se déplierait verticalement et propre à partir du toit du robot, en restant dans le périmètre initial (notre hexagone de 12,5 cm de côté) . Mais une petite analyse a vite montré que la solution se heurterait aux autres éléments en place dans le robot. Nous changeons notre fusil d’épaule et partons sur une solution à base de tissu lesté par une baguette de bois.
L’idée est d’avoir un morceau de tissu par face, soit 6 systèmes...
Nous arrivons assez vite à monter un prototype, cousu à l’arrache et agrafé à la structure du robot, utilisant un axe en bois et du fil de fer comme crochets. L’ensemble fonctionne bien. Sous le rouleau de tissus, nous fixons des baguettes à 45° pour retenir le tissu et éviter un déclenchement prématuré.

Déguisement, prototype enroulé.

Déguisement, prototype déroulé.
Voici le résultat en vidéo...
Prototype déguisement (720p - 3 Mo).
Y’avait plus qu’à...
Sauf qu’il manque encore un actionneur, en faire 5 autres et rallonger le tissu, car le pantacourt, ça fait négligé !
En faisant les différentes parties, nous trouvons évidemment des améliorations possibles, mais nous décidons de ne pas refaire les morceaux déjà réalisés juste pour un aspect esthétique. Ça nous aurait fait plaisir, mais nous sommes trop proches de l’échéance pour nous le permettre...
Après la perceuse et les pinces pour tordre le fil de fer, nous avons fait chauffer les aiguilles, que ce soit avec la machine à coudre ou à la main !
Déguisement en préparation

Le meilleur morceau du déguisement...
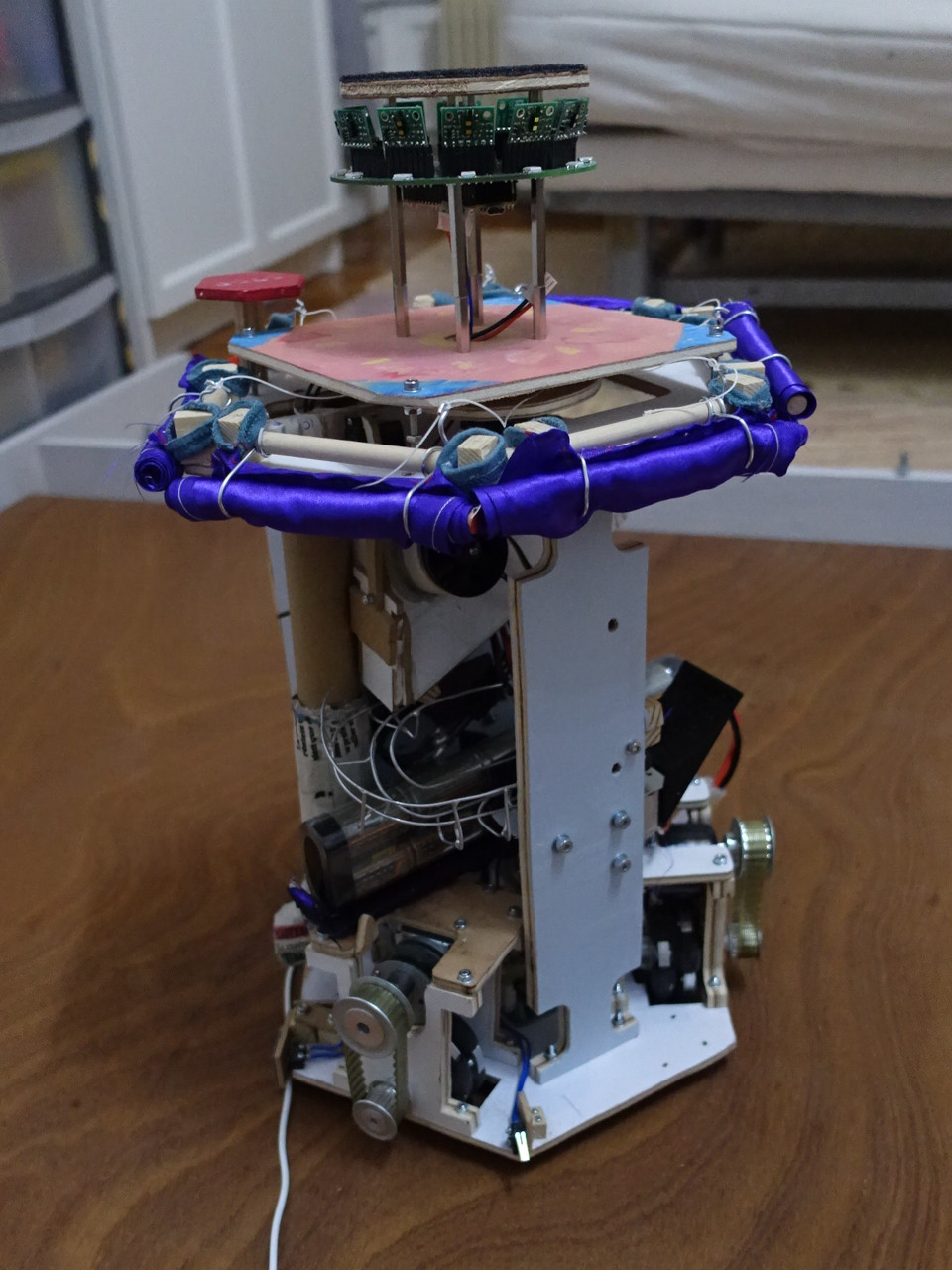
Puis il a bien fallu se faire un actionneur. La première piste, c’est un actionneur par face... Mais nous partons rapidement sur une solution avec un actionneur pour deux faces (moins cher, en argent et un entrées/sorties). Après analyse de l’encombrement de ces solutions, nous finissons par choisir de n’avoir qu’un actionneur pour les 6 côtés.
Nous suspendons un servomoteur au centre du robot, sous le toit, et relions chaque système avec du fil de cerf-volant à la pièce que nous avons découpée à la scie à chantourner et accrochée au servomoteur. La forme un peu bizarre est due au passage des câbles pour la carte de détection sous le support balise. La découpe est-elle vraiment utile, nous ne le savons pas !

Actionneur du déguisement
Le résultat nous plaît, même si le robot est plus joli sans son déguisement qu’avec !
Déguisement plié

Déguisement déplié
Nous nous sommes quand même fait plaisir en gardant une visualisation sur l’affichage du score !
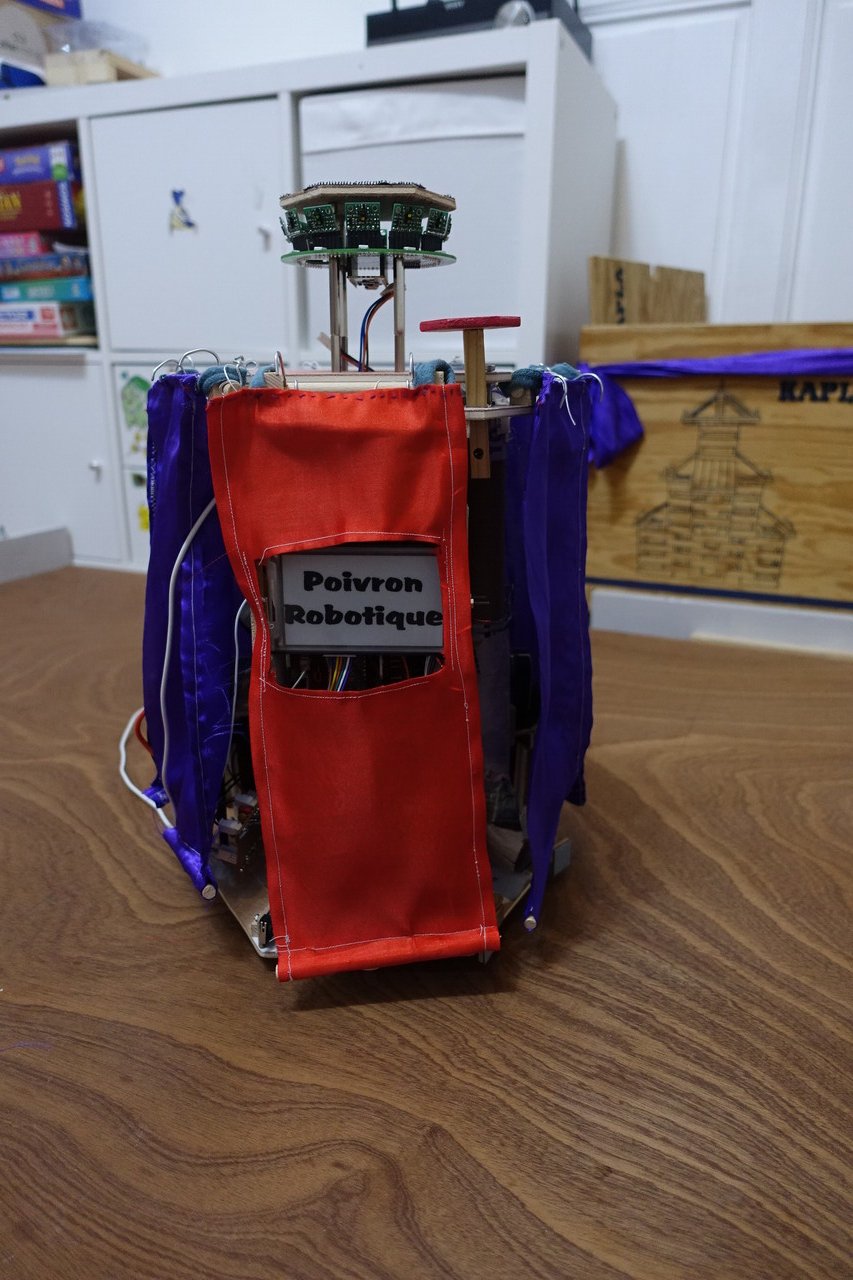
Déguisement et score
Et pour conclure cet article, le tout en vidéo !
Prototype déguisement (1080p - 2 Mo).
Commentaires
Il n'y a pas de commentairesAjouter un commentaire
Administration du site