Mesures avec une roue codeuse
13 septembre 2012
Une fois le montage du capteur et la méthode d’acquisition validés, on peut s’intéresser au différentes mesures que nous pouvons réaliser.
Dans notre cas, nous avons une roue codeuse de 200 pas par tour montée sur un moteur ayant un réducteur de 10 pour 1. Ce réducteur est relié à votre roue qui mesure 5 cm de diamètre.

Montage
Chaque pas de la roue représente un déplacement de :
5*PI/200/10 = 0,007cm = 0,07mm
Bref, une précision qui semble très honorable. Maintenant nous voulons une vitesse, et ce toutes les millisecondes.
Mesure de vitesse
La précision en vitesse est d’un pas de roue tout les pas de temps, soit :
(5*PI/200/10)/0,001 = 7cm/s
Si ça nous permet de définir plusieurs vitesses de croisières, cette précision risque d’être trop mauvaise pour s’arrêter précisément.
Vous commencez à comprendre le principe ?
Mesure d’accélération
Même principe, l’accélération (non nulle) la plus faible que l’on puisse mesurer est l’écart entre deux vitesses mesurables divisé par notre pas de temps. Un petit calcul ?
0,07/0,001 = 70 m/s²
Amélioration
Les résultats calculés semblent catastrophique. Il est possible de les améliorer, dans une certaine mesure, en augmentant le temps d’acquisition. Ceci présente un inconvénient pour un asservissement car ça ajoute un retard dans la boucle. En faisant passer notre temps d’acquisition de 1 ms à 10 ms, voici nos nouvelles précisions :
Vitesse : 7 mm/s
Accélération : 70 cm/s
La précision de la vitesse devient acceptable, mais la précision de l’accélération reste affreuse.
Pour réduire un peu notre retard et garder une précision correcte, nous gardons une acquisition à 1 ms mais utilisons une moyenne glissante sur les 10 dernières acquisition.
Voici des graphiques montrant les 3 types d’acquisition :
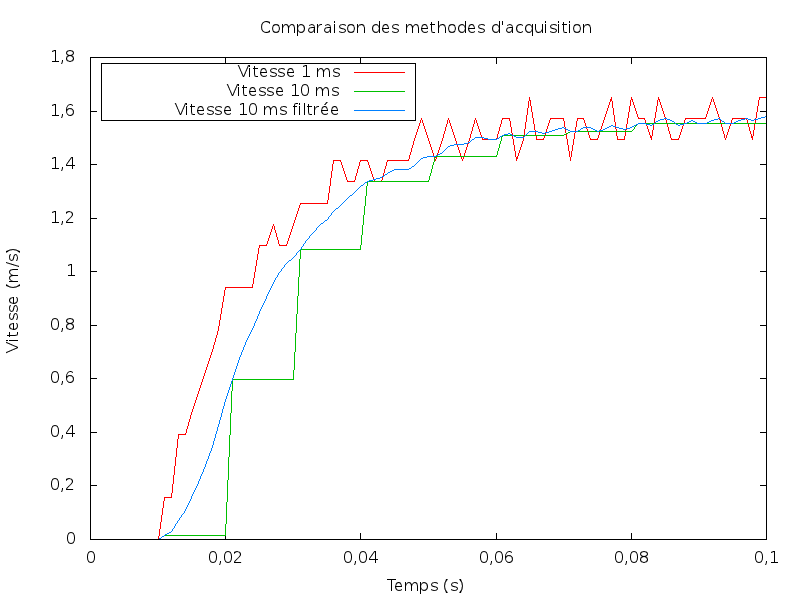
Accélération à vide |
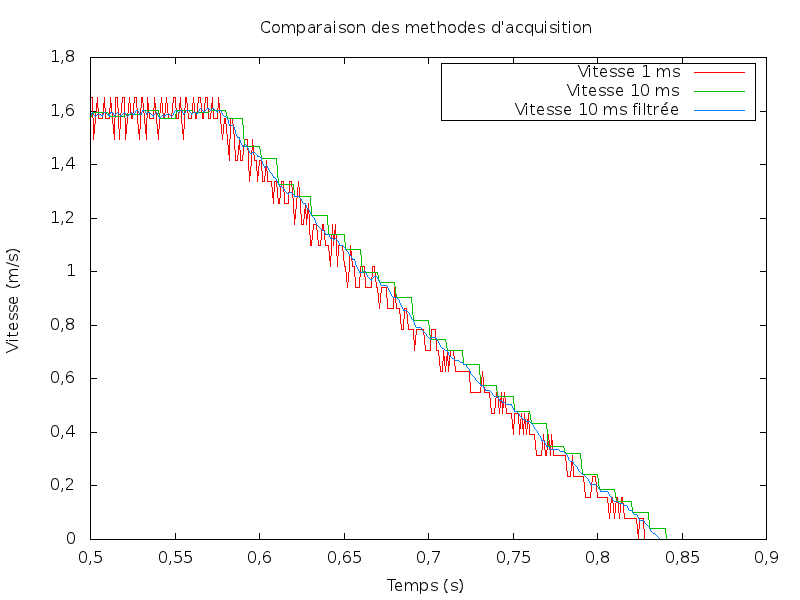
Décélération à vide |
Sur la vitesse calculée toutes les millisecondes, nous observons des oscillations dues au manque de précision. Ces oscillations sont quasiment inexistantes sur les deux autres courbes.
Nous observons un retard de 5 ms pour la mesure filtrée sur 10 acquisitions et un retard de 10 ms pour la mesure brute sur 10 ms. Il y a de bonnes chances pour que ces retards ne soient pas gênant pour notre utilisation, mais ceci devra être vérifié.
Contournement du problème
Nous nous satisferons de la précision de la vitesse, par contre, nous utiliserons un autre capteur pour mesurer l’accélération de notre moteur.
En fouillant nos cours, on retrouve que le couple fourni par le moteur est proportionnel au courant qui le traverse. Nous mettons donc une faible résistance en série avec le moteur et nous mesurerons sa tension pour avoir une image du courant.
Une fois que nous aurons le couple moteur, une application de la seconde loi de Newton sur un robot à plat nous dit que l’accélération se déduit du couple moteur, de l’inertie et des couples résistants. L’estimation de ces grandeurs fera l’objet d’un autre article.
Commentaires
Il n'y a pas de commentairesAjouter un commentaire
Administration du site