Portail des équipes
Coupe de france de robotique - Eurobot
Toto
Présentation de l’équipe
L’équipe est constituée d’un groupe d’ami, tous anciens élèves d’une école d’informatique représentée à la coupe par un lapin rose. Éparpillé en France, l’objectif est de partir d’une idée la plus farfelue possible pour en faire un robot homologable.
Présentation du robot
Toto est un robot marcheur bipède. Sa mécanique ingénieuse lui permet de n’utiliser qu’un très petit nombre d’actionneurs. Son secret réside dans la forme de ses pieds qui lui permet d’être stable lorsqu’un pied est levé.

Toto
Ici, point de pièce imprimée en 3D, point d’usinage au centième. Ce robot est construit avec ce qui trainait. Agglo de 20mm, contre-plaqué de 5 mm, médium de 3 mm, alu et plastique provenant d’un magasin de bricolage. Seule une glissière a été achetée pour l’occasion.
La marche
L’excroissance au niveau de chaque pied permet de s’assurer que le centre de gravité du robot sera toujours au dessus de la zone d’appui du pied.

Empreinte de Toto
L’empreinte de Toto est particulièrement reconnaissable, que ce soit sa forme de pied ou par l’excroissance ronde.
Un unique servomoteur lui permet de lever la jambe gauche ou la jambe droite tout en maintenant le haut du robot vertical.

Toto fait un pas
Enfin chaque jambe peut pivoter autour d’un axe vertical. Ces servomoteurs sont visibles sur l’image de présentation de Toto.
Le mât balise
Le règlement de la coupe de France de robotique recommande que les robots aient un support pour une balise située à précisément 43 cm du sol. Bien que ce ne soit pas une obligation, ceci peut grandement faciliter la détection du robot par l’adversaire. Comme c’est dans les principes de l’équipe de Toto de ne pas gêner l’adversaire, le mât balise sera réalisé avec soin.
Jusqu’à présent nous n’avons pas vu la moindre partie du robot qui soit stable en hauteur.
Le mât est relié à la partie supérieure du robot par une glissière de tiroir. Cette partie supérieure du robot reste verticale au cours du mouvement. La verticalité est garantie, mais pas la hauteur constante.
Lorsque le corps du robot s’incline pour lever une jambe, la partie supérieure du robot (en vert sur les schéma) reste verticale et se rapproche de la jambe restée à terre. Il est possible de déterminer le déplacement vertical et latéral de la partie supérieur du robot en fonction de l’inclinaison du corps de Toto.
Rajoutez un changement de repère pour exprimer ces déplacements dans le repère du corps du robot (qui s’incline) et vous pouvez fixer un gabarit qui maintiendra à hauteur constante le support balise.
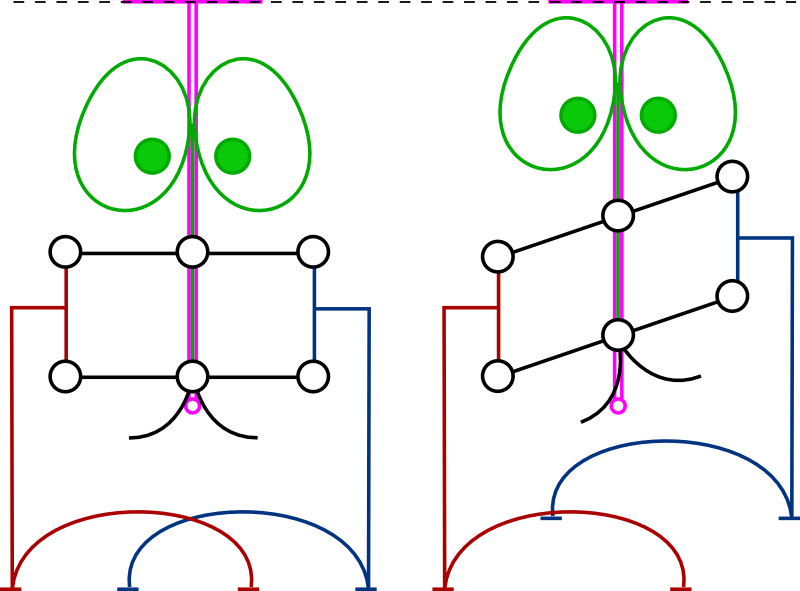
Toto a un mât
C’est exactement le système utilisé sur Toto ! Le gabarit qui maintient le mât à la bonne hauteur se trouve, comme sur le schéma, au niveau du bas du corps du robot.
Le tir des lances
Les lances sont stockées dans un panier. Le fond du panier est relié au haut du panier par deux ressorts. Le système est armé en début de match et, le moment venu, un servomoteur libère le fond du panier qui projette les balles. Relativement simple et particulièrement efficace !
Performances
Pour se déplacer, Toto n’utilise que des servomoteurs. Ce sont des actionneurs qui contiennent leur asservissement. De fait, le code qui pilote Toto ne contient pas le moindre asservissement, et pourtant...

A la fin du match
Ses mouvements parfaitement reproductibles lui permettent de s’installer confortablement devant le mammouth pour l’assaillir avec ses 6 lances. Un système rodé qui, une fois réglé, n’a pas montré de défaillance en match.
Le rouleau de ruban adhésif à l’arrière du robot peut paraître étrange. Il a simplement été utilisé comme contre-poids lors des derniers essais, puis il a été oublié sur le robot pour l’homologation. L’enlevé aurait demandé de ré-homologuer le robot, il a donc été gardé pour l’ensemble des matchs.
A découvrir
Toto les utilise et ça pourrait vous intéresser.
Les servomoteur Dynamixel
Des servomoteurs qui se pilotent avec un protocole série. Vous configurez la commande maximale du moteur, la position et le servomoteur vous obéit au doigt et à l’œil. Envie d’aller plus loin ? Les servo Dynamixel vous renvoient leur vitesse, leur température... Ce n’est pas assez ? Vous pouvez ajuster les paramètres de leur asservissement !
Toto utilise deux AX-12A pour tourner ses jambes, un MX-28T pour lever ses jambes et encore un AX-12A pour tirer ses lances.
Pour en savoir plus, vous pouvez découvrir la gamme (couple et vitesse des servomoteurs) ici, ou découvrir les instructions supportées par les AX-12 ici.
L’Arbotix-M
Vous utilisez une Arduino mais l’absence de broches pour alimenter vos capteurs et actionneur vous insupporte ? Vous trouverez peut-être votre bonheur ici. Chaque broche de donnée est accompagnée par une paire de broches de puissance (tension et masse).
Cette carte propose, en plus, 3 ports pour des servomoteurs Dynamixel.