Portail des équipes
Coupe de france de robotique - Eurobot
Cro-Minion
L’équipe
Composé de trois ancien de l’Intech l’équipe de GobGob Technologie participe à la coupe de France de Robotique en plus de mener leurs projets personnels.
Le robot
Objectifs :
- Déposer les fresques
- Tirer les lances sur le mammouth
- Lancer le filet sur le mammouth
Parfait croisement entre un Minion et un homme de Cromagnon, ce robot est un tueur ! Munie d’un canon optique mortel, les mammouths ne lui résistent pas. Il suit sa trajectoire à la ligne, s’arrête poliment devant ses adversaires et agite les bras pour les repousser.

Pour garder la ligne, de simples capteurs optiques placés sous son pagne en peau de bêtes (aucun animal non synthétique n’a été blessé). Ses roues et moteurs lui ont été gentiment prêtés par un aspirateur Neato XV-11 et il a arraché sa coque à un pulvérisateur de passage !

Pulverisateur
Conception
Les 1ères ébauches de Cro-Minion à l’automne 2013 :

Prototype Cro-Minion
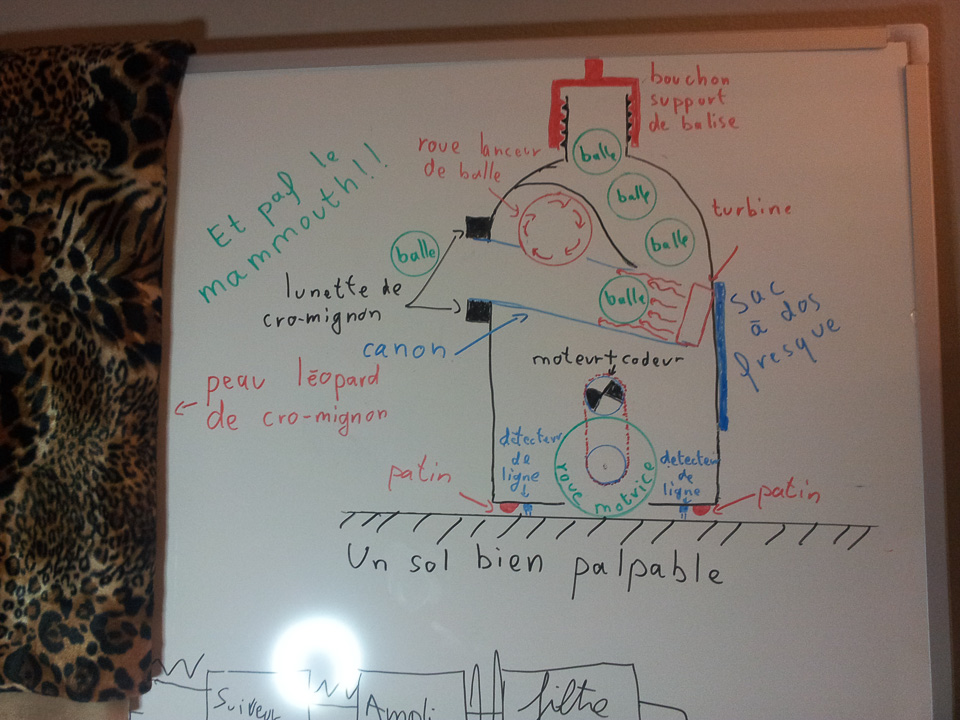
Schéma de principe
Petite vidéo de la bestiole en action :
Les dessous de Cro-Minion

Entrailles de Cro-Minion
Les actionneurs
Le canon à balles
Mécanisme assez classique, les balles passent sous une roue qui tourne à haute vitesse et sont propulsées vers l’avant.
Le tube, le support du moteur et les différents carters de guidage des balles ont tous été réalisé sur une imprimante 3D. Ce mécanisme étant situé dans la partie sphérique de la tête il fallait optimiser l’espace au maximum.
Au fond du tube, un ventilateur aide les balles à remonter jusqu’à la roue (une sorte d’inverseur de gravité low-cost en quelque sorte).

Le canon
Oui, c’est bien une roue de mécano !
Ce tube bleu permet de rallonger le tube du canon tout en facilitant le démontage de la coque (qui coulisse vers le haut).

Le canon
Le ratatouilleur ! Derrière ce nom technique se cache le mécanisme qui remue les balles pour éviter qu’elles ne se coincent les unes les autres. En effet, les balles sont recouvertes de VelCro™.
Pour économiser une sortie sur la carte mère, les deux servomoteurs y sont reliés par un câble en Y.

Ratatouilleur
Malgré l’agitation des servomoteurs, les balles avaient encore tendance à rester bloquées… quelques bouts de scotch, plastique ou carton de plus ont aidé un peu mais le canon n’était vraiment pas fiable.

Bidouillages
Le lance filet

Lance filet
Le capteur
Ce capteur sert à détecter les adversaires qui pourraient se mettre sur le chemin de Cro-Minion. Il s’agit d’un capteur à ultrasons (SRF05) utilisé par de nombreuses équipes.

Capteur ultrasons |

Capteur ultrasons |
Les accessoires
Les bras
Les bras, instruments indispensables pour effrayer les ennemis, ont été réalisés à partir de serpents en bois découverts par hasard dans un supermarché.

Serpent décoratif
Les mains ont été imprimées en 3D puis peintes en noir à la bombe.

Les bras
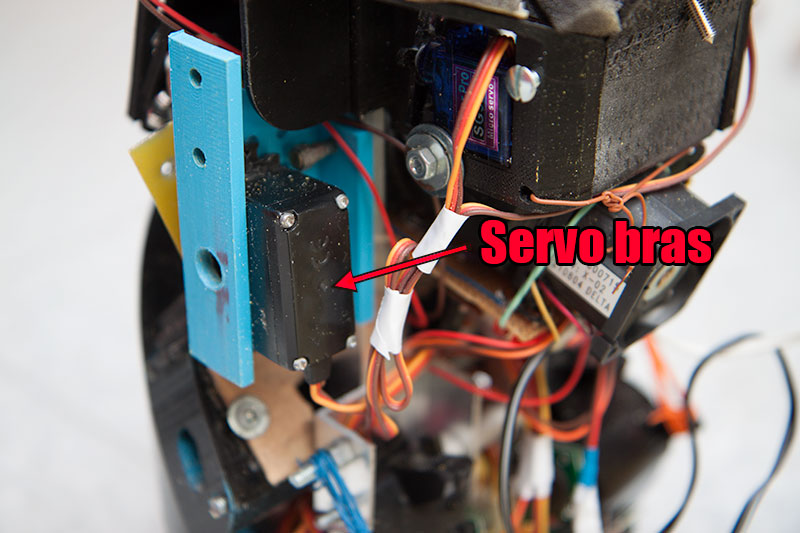
Servomoteur pour les bras
Les dents
Difficile de faire plus simple : une feuille de papier blanc, une paire de ciseaux et voilà !

Les dents
L’œil de bois
Réalisée le jour de la fête des mère, la décoration des lunettes possède quelques similitudes avec un collier de pâtes.

Œil de bois
L’électronique
Reprenant en partie l’architecture de l’année précédente, une carte Raspberry Pi assure la stratégie et exécute du code haut niveau : la stratégie est codée en Python 3 et tourne sur Raspbian.
Les traitements temps réel (asservissement principalement) sont assurés par une carte Teensy 3.1. L’adaptation du code précédemment utilisé sur une carte Arduino à la carte Teensy 3 a demandé moins de 24h. Le gain en puissance s’est fait sentir lors de l’enrichissement des fonctionnalités (96MHz, 32bits et…virgule flottante !).
Les ponts en H sont ceux qui étaient utilisés dans l’aspirateur d’où sont issus nos moteurs, des petites puces A3950. Moins encombrants que les LMD18200 utilisés l’an dernier, mais uniquement adapté pour des moteurs à faible courant (pour les robots pépères !).

Electronique