Portail des équipes
Coupe de france de robotique - Eurobot
RCVA
Présentation de l’équipe
Équipe de l’IUT de la ville d’Avray, RCVA est un nom connu à la coupe de France de robotique. Leur nom figure généralement en haut du classement. À cela, rien d’évident ou d’entendu d’avance ! Quiconque regarde de près leurs robots découvre un certain génie. En cherchant la performance, ils déploient des solutions qu’aucune des 180 autres équipes n’a osée mettre en œuvre !

Équipe RCVA (2014)
Leur site internet contient quelques cours liés à la Coupe de Robotique qui sont devenus des références dans le milieu. Leur tuteur, connu sous le nom de Gargamel sur le forum de Planète-Sciences, n’hésite pas à partager son savoir et à donner de précieux conseils aux autres équipes. Un moyen de maintenir la pression chez ses propres élèves ? Allez savoir !
Présentation des robots
RCVA présente deux robots cette année. Le plus gros est équipé pour manipuler les feux et récolter les fruitmouths. Le plus petit peut tirer les lances, déposer les peintures sur la fresque, tirer le filet et faire tomber des feux.
Les robots de RCVA
Gros Robot
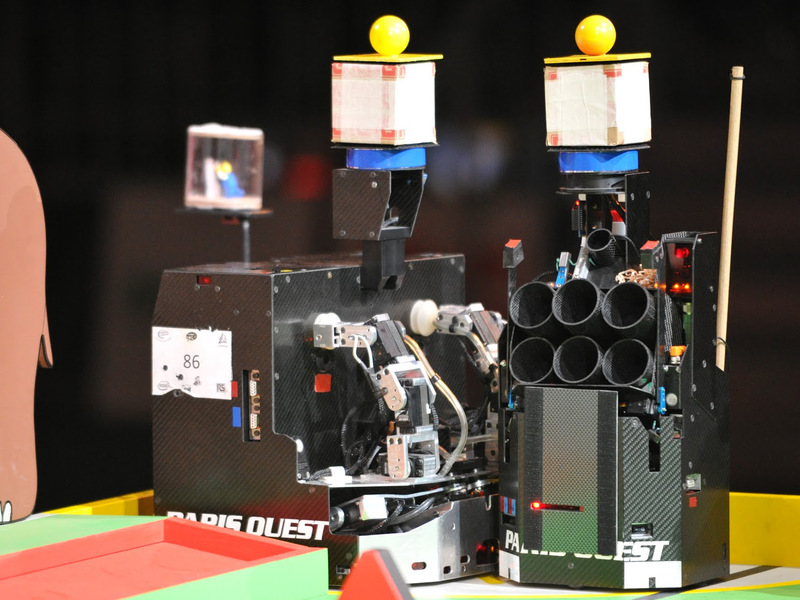
Ce robot est chargé de récolter les fruitmouths et de capturer les feux. Il cueille les fruitmouths 4 par 4. Il est capable de stocker 4 feux individuellement et d’attraper 2 torches. Au total, c’est 10 feux que le robot peut déplacer. Et ça, c’est unique !

Gros robot, avec ses capteurs
Gestion des feux
Les feux sont gérés par l’avant du robot. Le robot comporte une paire de bras supérieurs, une paire de bras inférieurs et deux ventouses situées sur le panneau avant. Tous les bras sont terminés par une ventouse qui permet de manipuler les feux.
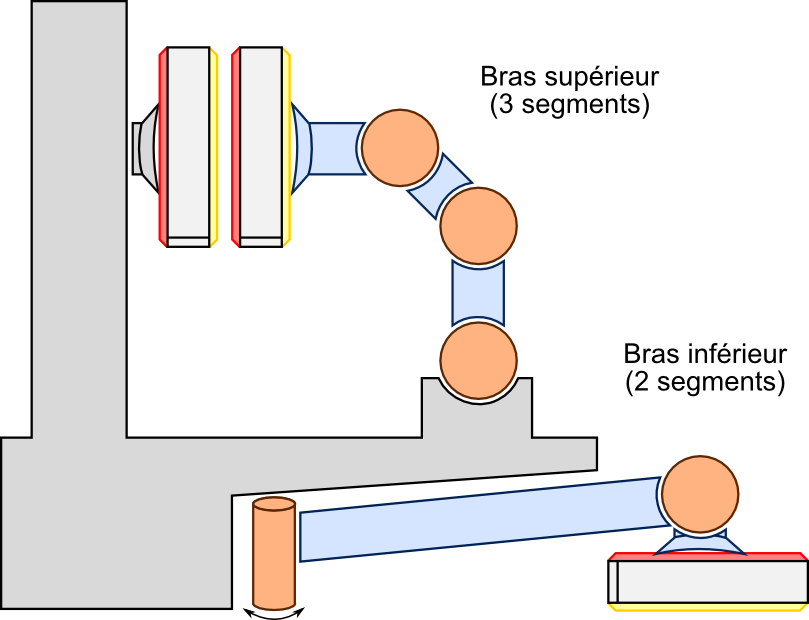
Bras du gros robot |
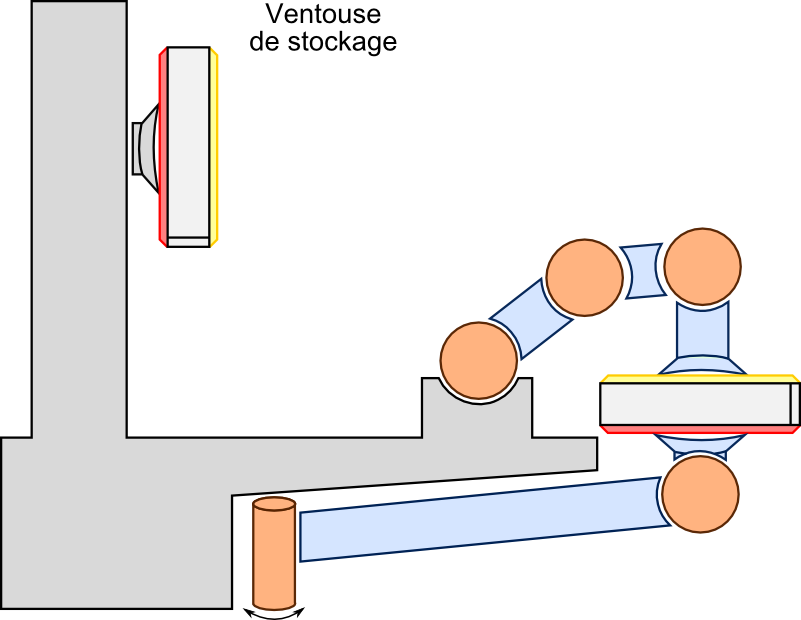
Retournement de feux |
Ces éléments sont répartis en deux chaines indépendantes de traitement des feux :
- Le bras supérieur, muni d’une ventouse et d’un capteur optique, permet d’attraper le feu, de le stocker ou de le confier à la ventouse ventrale.
- La ventouse ventrale stocke le feu jusqu’à ce que le bras supérieur vienne le reprendre.
- Au moment de la dépose, si feu présente la mauvaise face, le bras supérieur confie le feu au bras inférieur. C’est le bras inférieur qui retournera le feu juste avant de le déposer.
Voici le robot en action. La vidéo a été ralentie afin que son mouvement soit bien visible.
Gestion des fruitmouths
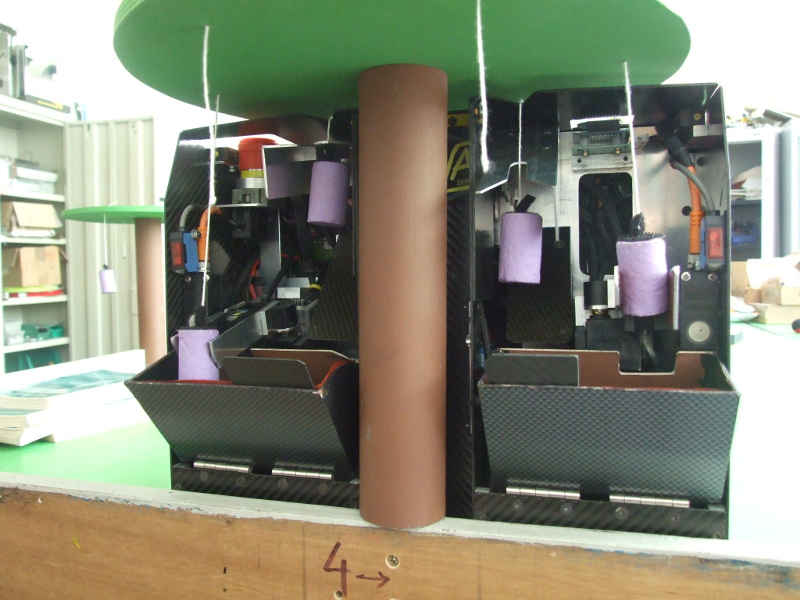
Cueillette par RCVA
Le robot récupère 4 fruitmouths par arbre en une seule action. Pour cela, 2 doigts et 2 pinces font tomber les précieux fruits dans les deux bacs du robot. Initialement en position verticale, les bacs peuvent basculer vers l’arrière du robot. Légèrement basculés, les bacs peuvent accueillir les fruits ; complètement basculés, les bacs se vident de leur contenant.
Petit Robot

Petit robot de RCVA (2014)
S’il parait moins impressionnant que le gros robot, c’est lui qui marque la majorité des points !
Les 6 balles sont chargées dans les tubes de carbones au début du match. Dans chaque tube, un ressort peut propulser la balle. Les ressorts sont retenus deux par deux. Ainsi, le robot peut tirer les six balles d’un coup ou, au contraire, les tirer deux par deux et tenter de marquer les points de coopération.
Un bras de chaque coté du robot permet de faire basculer les feux. Ces bras peuvent renverser les feux qui se trouvent sur le chemin du petit robot ou ceux qui se trouvent contre la bordure.
Le filet, qui doit être lancé sur la mammouth à la fin du match, est accroché à un cylindre. Le cylindre est inséré dans le petit tube se trouvant au dessus des 6 tubes dédiés aux balles. Pour s’assurer d’être à la bonne distance, le robot mesure sa distance avec la cible avec un laser, ceci pour parer à une éventuelle poussée involontaire du robot adverse.
Capteurs et actionneurs
Ventouse
Les ventouses utilisées sont reliées à une pompe qui crée la dépression nécessaire pour obtenir l’adhésion des feux. Avec des ventouses commandées, il est possible de transferer les éléments d’une ventouse à l’autre.
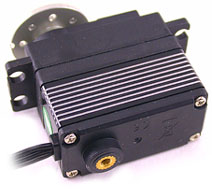
Servomoteur
Ce ne sont pas moins de dix servomoteurs Hitec HSR-5990GT qui sont utilisés pour motoriser les bras (3 servos par bras supérieurs, 2 servos par bras inférieur). Ce sont de très bons servomoteurs équipés de deux roulements à billes et d’engrenages en titane. En plus du pignon supérieur, ce servomoteur dispose d’une sortie sur la face inférieure du servomoteur. Avec ces deux points de fixation, les liaisons mécaniques réalisées avec ces servomoteurs sont robustes et supportent des efforts importants.
Servo à double sortie |
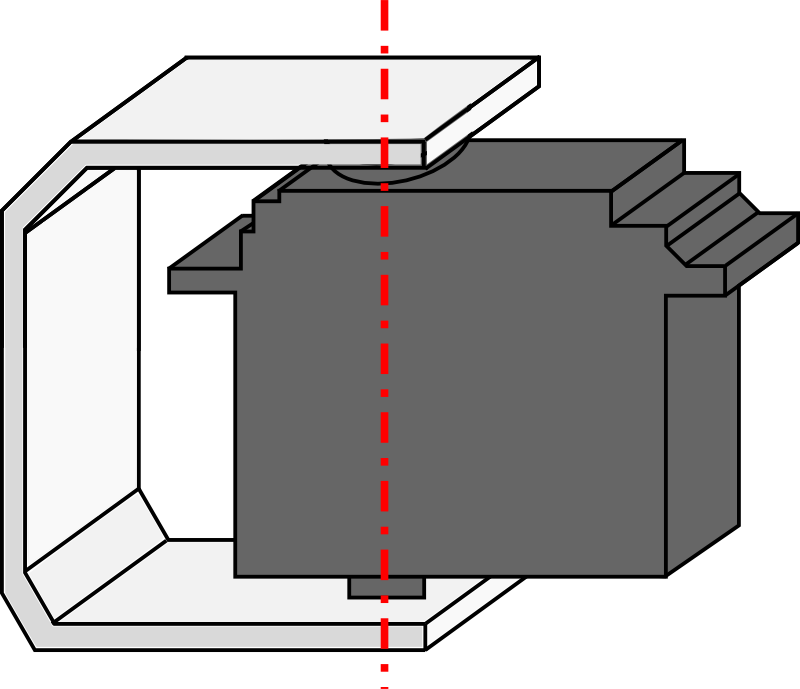
Servo avec une fourche |
Laser DT35
C’est un capteur de chez Sick. Il a une portée de 5 cm à 12 mètres, largement de quoi couvrir toute la table ! Avec une précision de 5 millimètres et un temps d’acquisition de l’ordre de 5 millisecondes, le robot peut balayer la table en une rotation et connaître la position des feux.

Capteur DT35
Évitement
L’évitement de RCVA utilise deux sous-systèmes. Tout d’abord, des balises infrarouges indiquent si un robot adverse se trouve dans le voisinage. Ces balises ne donnent qu’une position approximative du robot adverse. Vous avez une balise similaire à celle utilisée par RCVA, ici !
Lorsque c’est le cas, les robots se servent de leurs capteurs à ultrason pour confirmer la présence du robot adverse. Les capteurs à ultrason sont fiables et précis pour détecter des obstacles, mais ils détectent aussi bien les robots adverses que les humain sur le bord de la table ou les éléments de jeux, d’où l’utilisation de la balise infrarouge pour n’activer ces capteurs que lorsque cela s’avère nécessaire.
Palmarès
En 2014, ils ont reproduit l’exploit ! Champion d’île de France, champion de France et champion d’Eurobot. Voici, pour le plaisir des yeux, la vidéo de l’un de leur match :